

Pinecone picking robot
A technology of robots and pine cones, applied in the directions of manipulators, harvesters, program-controlled manipulators, etc., can solve the problem of manual picking of pine cones, and achieve the effect of improving walking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] This embodiment is a pine cone picking robot.
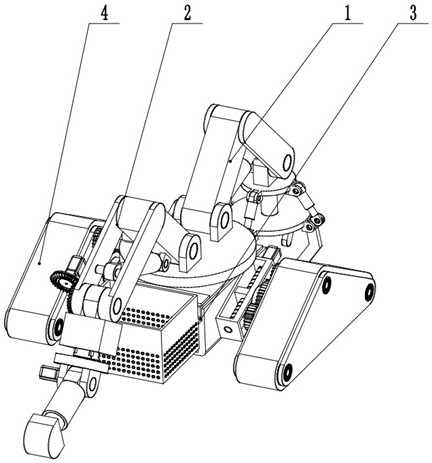
[0036] refer to figure 1 , including: a picking device 1, a clearing device 2, a body device 3, and a moving device 4; the body device 3 and the walking part 4 cooperate to control the robot to move to the vicinity of the pine cones, and the clearing device 4 clears obstacles around the pine cones, and the picking device 1 Place the pine cones in the pine cone frame 312 of the body device 3.
Embodiment 2
[0038] This embodiment is a pick-up device 1 .
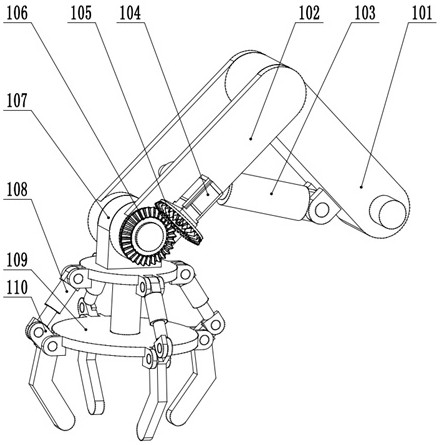
[0039] refer to figure 2 , as a kind of pine cone picking robot described in embodiment 1, the telescopic control of the arm electric cylinder 103 of the picking device 1 picks up the double arm 102 to rotate around the big arm 101 of picking up, and the rotation of the swivel motor 104 controls the swivel base 107 relative to the pick-up The double arm 102 rotates, the bottom of the claw electric cylinder 108 rotates and is installed on the swivel base 107, the claw base 109 is installed on the swivel base 107, the gripper 110 is rotated and installed on the claw base 109, and the claw electric cylinder 108 telescopically controls the grasping of the gripper 110 The pine cone, the pick-up motor 303 of the body device 3 rotates to control the pick-up arm 101 to rotate, and the swivel motor 104 rotates to control the swivel base 107 to rotate relative to the pick-up arms 102, and the claw electric cylinder 108 telescopically con...
Embodiment 3
[0041] This embodiment is an obstacle removal device 2 .
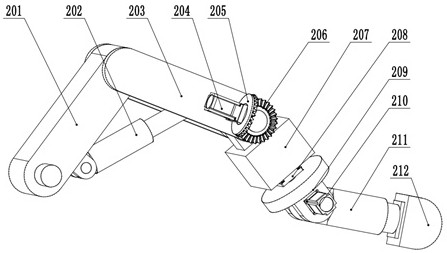
[0042] refer to image 3 , as a kind of pine cone picking robot described in embodiment 1, the obstacle-clearing electric cylinder 202 of the obstacle-clearing device 2 telescopically controls the obstacle-clearing double arms 203 to rotate relative to the obstacle-clearing arm 201, and the rotating motor 204 rotates and controls the motor box 207 to rotate When the obstacle-clearing arms 203 rotate, the end motor 208 rotates to control the rotary block 209 to rotate relative to the motor box 207, the pendulum motor 210 rotates to control the obstacle-clearing electric cylinder 211 to rotate relative to the rotary block 209, and controls the obstacle-clearing head 212 to remove the obstacle. Open, the obstacle-clearing electric cylinder 211 telescopically controls the obstacle-clearing head 212 to carry out obstacle-clearing, and the obstacle is pushed away, and the obstacle-clearing head 212 is installed on the obstac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More