

A method for single-joint power-assisting exoskeleton inversion self-adaptive robust force control
An adaptive robust, single-joint technology, applied in the field of robotics, can solve problems such as immaturity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
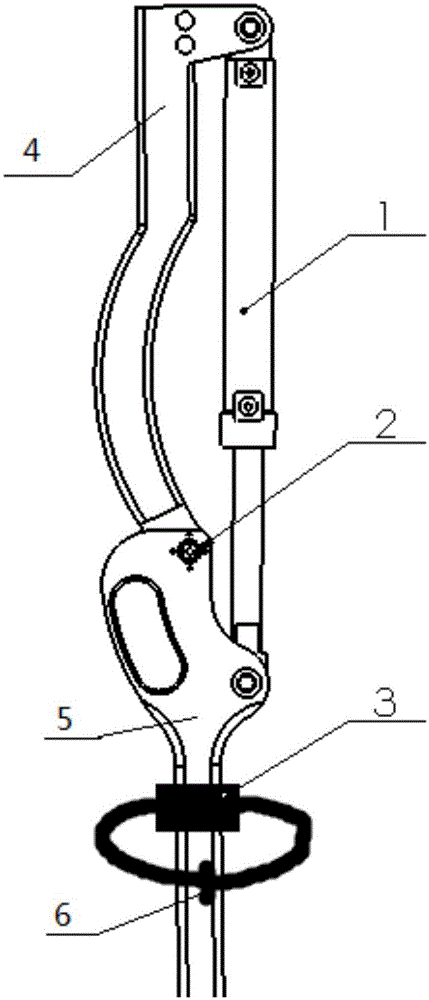
[0060] Such as figure 1 As shown, a single-joint power-assisted exoskeleton includes: a hydraulic cylinder 1, a joint rotary encoder 2, a force sensor 3, a first rod 4, a second rod 5, a bandage 6, and an electro-hydraulic servo valve (not shown in the figure). output), servo amplifier board (not shown in the figure), real-time controller (not shown in the figure); the first rod 4 and the second rod 5 are connected by a hinge, and a joint rotary encoder is arranged at the hinge 2. One end of the hydraulic cylinder 1 is hinged to the first rod 4 , and the other end is hinged to the second rod 5 ; the force sensor 3 is arranged on the second rod 5 , and the strap 6 is connected to the force sensor 3 .
[0061] The hydraulic cylinder 1 is connected with the electro-hydraulic servo valve, the electro-hydraulic servo valve is connected with the servo amplif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More