

Vehicle turning control method and device, vehicle and storage medium
A technology for turning control and vehicles, applied in the directions of control devices, vehicle components, transportation and packaging, etc., can solve the problems of easy steering wheel shake, poor comfort, and inability to pass curves with large curvature.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
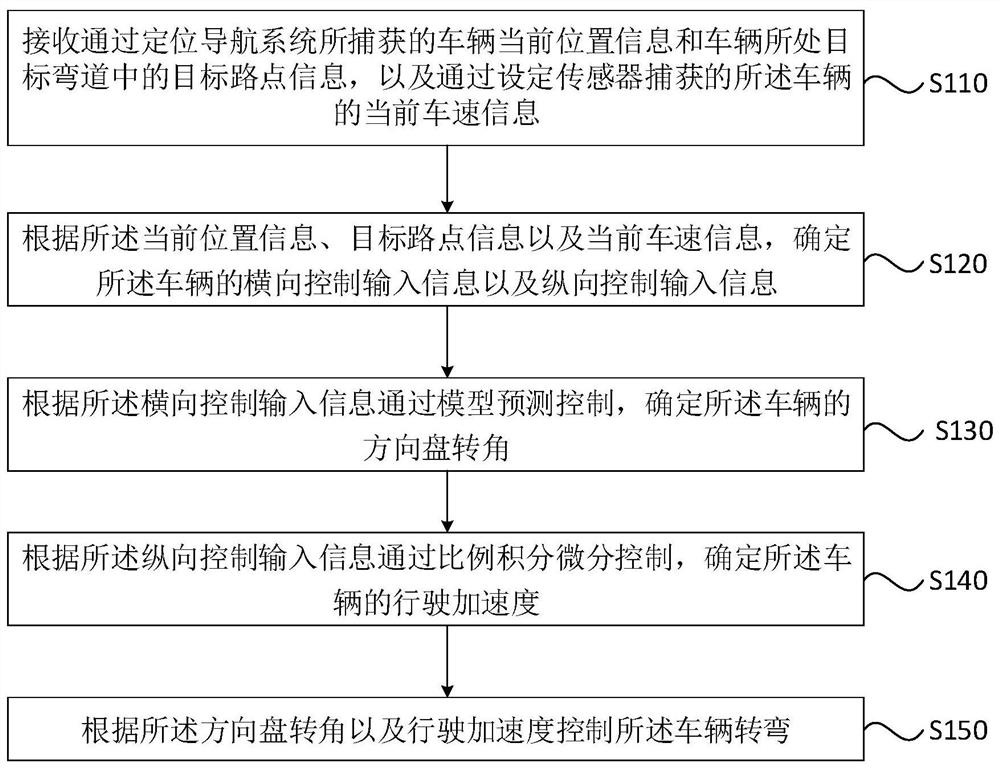
[0033] Figure 1A It is a flow chart of a vehicle turning control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of controlling any vehicle when turning. A vehicle turning control method provided in this embodiment can be executed by a vehicle turning control method device provided in an embodiment of the present invention, and the device can be realized by means of software and / or hardware, and integrated in a vehicle that executes the method , the vehicle may be an autonomous vehicle.
[0034] refer to Figure 1A , the method includes but is not limited to the following steps:
[0035] S110, receiving the current position information of the vehicle captured by the positioning and navigation system, the target waypoint information of the target curve where the vehicle is located, and the current speed information of the vehicle captured by the setting sensor.
[0036] Wherein, the positioning and navigation system may...
Embodiment 2
[0068] figure 2 It is a schematic structural diagram of a vehicle turning control device provided in Embodiment 2 of the present invention. Such as figure 2 As shown, the device may include:
[0069] The information receiving module 210 is configured to receive the current position information of the vehicle captured by the positioning and navigation system and the target waypoint information in the target curve where the vehicle is located, as well as the current speed information of the vehicle captured by setting the sensor;
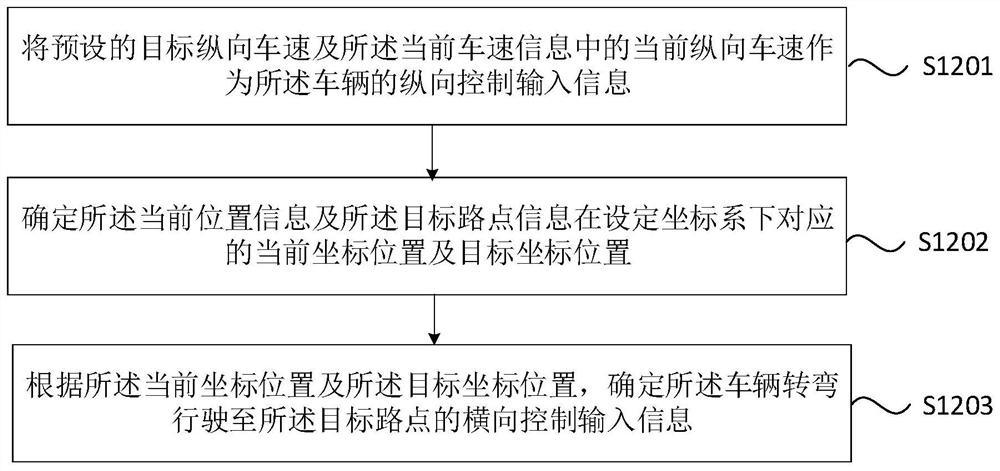
[0070] An information determination module 220, configured to determine lateral control input information and longitudinal control input information of the vehicle according to the current position information, target waypoint information and current vehicle speed information;
[0071] A steering angle determination module 230, configured to determine the steering wheel angle of the vehicle through model predictive control according to the lateral...
Embodiment 3
[0089] image 3 A structural schematic diagram of a vehicle provided in Embodiment 3 of the present invention, as image 3 As shown, the vehicle includes a positioning and navigation system 310, a vehicle sensor 320, a steering wheel 330, a controller 340, a storage device 350 and a communication device 360; the number of the vehicle sensor 320 is at least one, image 3 Take a vehicle sensor 320 as an example; the number of controllers 340 in the vehicle can be one or more, image 3 Take a controller 340 as an example; the positioning and navigation system 310, the vehicle sensor 320, the steering wheel 330, the controller 340, the storage device 350 and the communication device 360 in the vehicle can be connected through a bus or other methods, image 3 Take connection via bus as an example.
[0090] The positioning and navigation system 310 is used to determine the position of the vehicle and guide the route; the vehicle sensor 320 is used to measure the working state pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More