Obstacle avoidance strategy determination method and device and storage medium
A strategy determination and obstacle avoidance technology, applied in the computer field, can solve the problem of low security of obstacle avoidance strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The specific implementation manners of the present application will be further described in detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present application, but not to limit the scope of the present application.
[0059] First, some terms involved in this application are introduced.
[0060] Inverse reinforcement learning: refers to the process of learning a reward function from expert examples. Reverse reinforcement learning includes, but is not limited to, the following types: apprentice learning, Maximum Margin Planning (MMP), structured classification, and neural reverse reinforcement learning, etc. This application will not list the types of reverse reinforcement learning here.
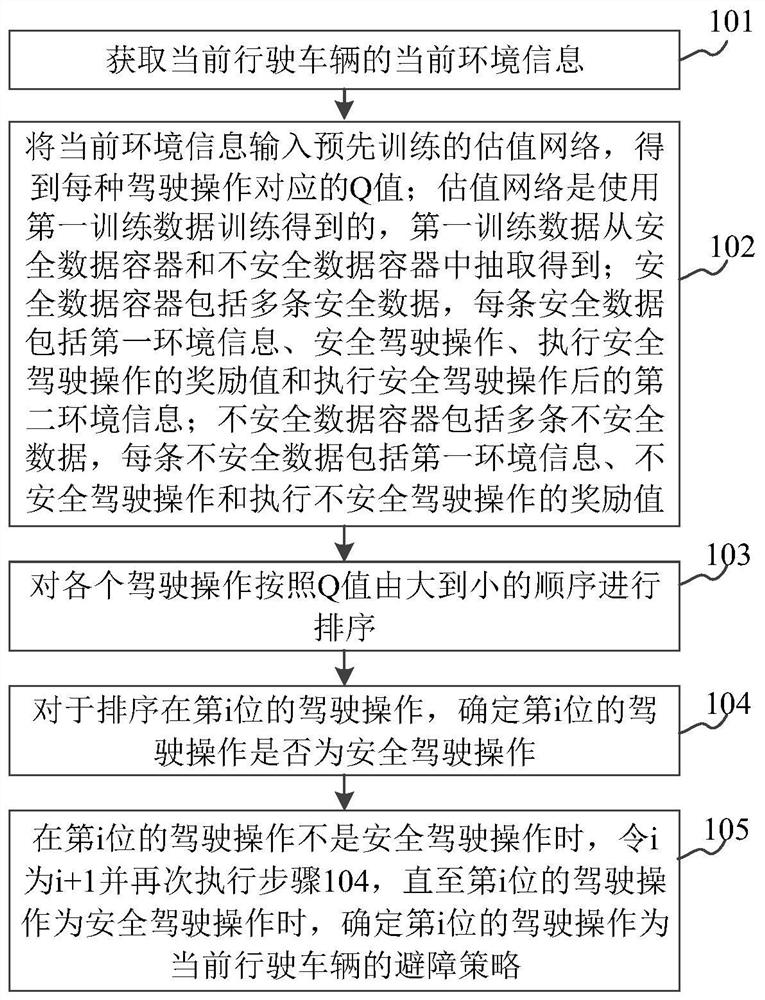
[0061] Q-Learning: refers to the method of learning the expected value (Expected Utility) (or Q value) corresponding to each operation. The model for learning Q-Learning can be a neural network, and the model obtained i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More