

Environment detection system, method, equipment and medium for unmanned vehicle
An unmanned vehicle and environment detection technology, which is applied in the field of environment detection system of unmanned vehicles, can solve the problems of being unable to use the environment detection system to perceive environmental information as a whole, large volume, and high quality, and achieve multi-directional overall perception of the environment Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
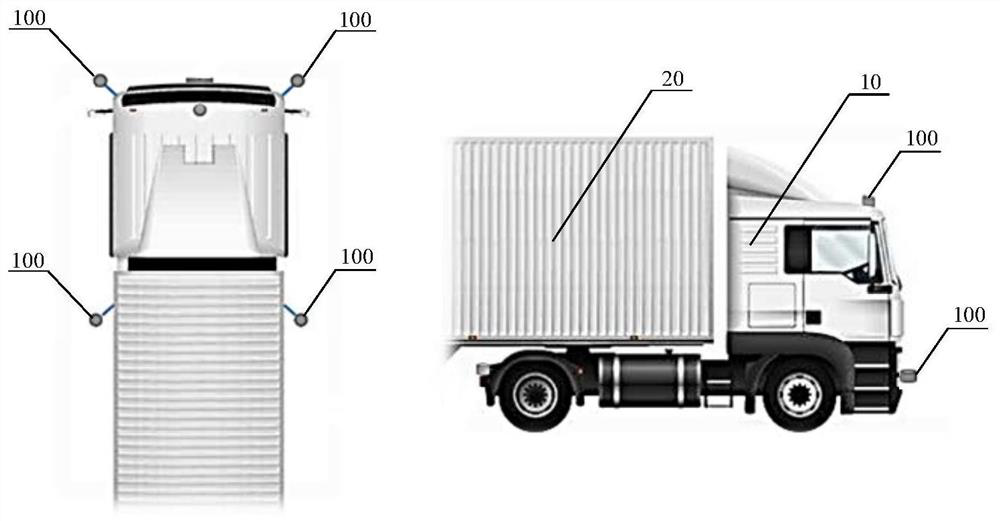
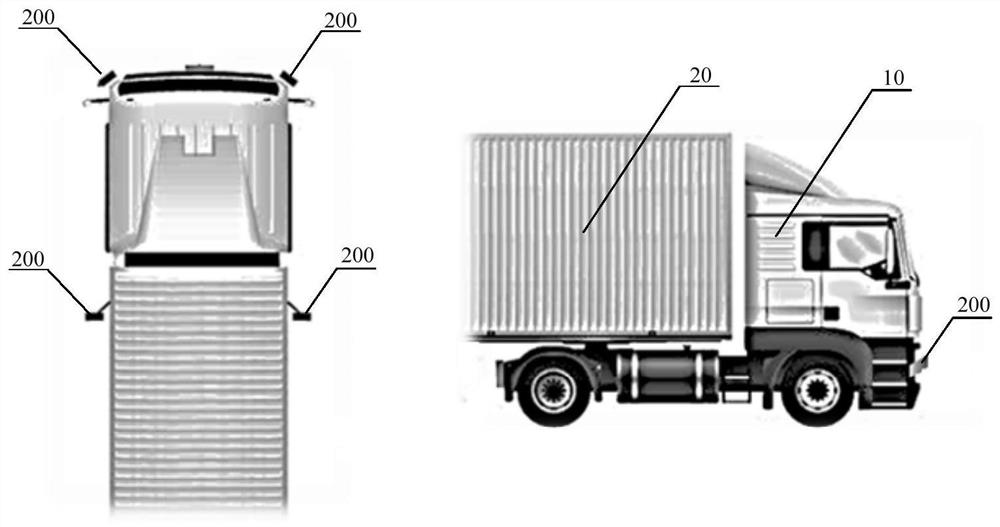
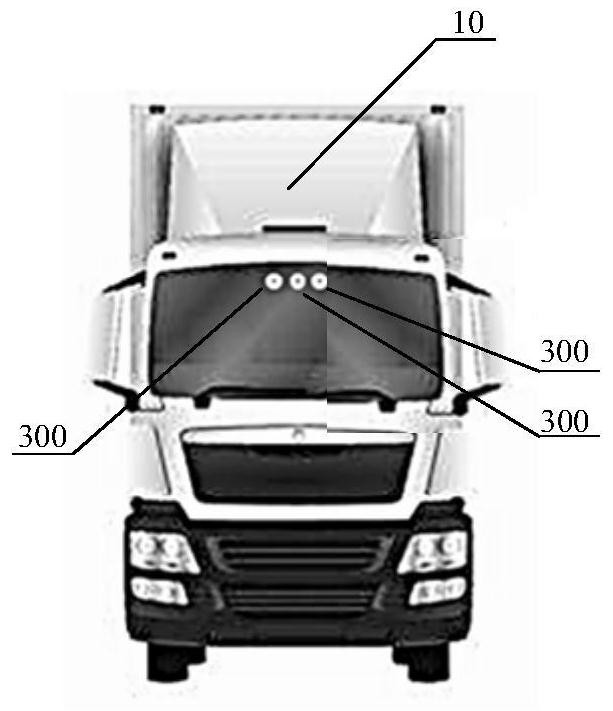
[0035] figure 1 It is a schematic layout diagram of a laser radar used in an environment detection system for unmanned vehicles provided by Embodiment 1 of the present invention; figure 2 It is a schematic layout diagram of a millimeter-wave radar used in an environment detection system for unmanned vehicles provided by Embodiment 1 of the present invention; image 3 It is a schematic layout diagram of a camera used in an environment detection system for an unmanned vehicle provided by Embodiment 1 of the present invention. The environment detection system provided in this embodiment can be applied to unmanned vehicles to detect surrounding environment information during driving, especially can be applied to unmanned heavy-duty tractors for expressway long-distance logistics transportation, such as heavy trucks, to Make heavy-duty tractors have multi-dimensional, multi-directional overall perception of the environment. see figure 1 , figure 2 and image 3 As shown, the ...
Embodiment 2
[0047] Figure 4 It is a schematic layout diagram of a laser radar used in an environment detection system for an unmanned vehicle provided in Embodiment 2 of the present invention; Figure 5 It is a schematic layout diagram of a millimeter-wave radar used in an environment detection system for unmanned vehicles provided by Embodiment 2 of the present invention; Figure 6 It is a schematic layout diagram of a camera used in an environment detection system for an unmanned vehicle provided by Embodiment 2 of the present invention. In this embodiment, on the basis of the foregoing embodiments, the "first preset number of laser radars", "the second preset number of millimeter-wave radars" and "the third preset number of cameras" are further optimized. The explanations of terms that are the same as or corresponding to the above-mentioned embodiments will not be repeated here.
[0048] see Figure 4 The first preset number of lidars in the environment detection system for unmanne...
Embodiment 3
[0076] Figure 7 It is a flow chart of an environment detection method provided by Embodiment 3 of the present invention. This embodiment can be applied to detecting the information of the surrounding environment during the driving process of unmanned vehicles, especially applicable to unmanned vehicles for long-distance logistics transportation on expressways. Man drives a heavy tractor, such as a heavy truck. The method can be executed by the environment detection system provided in the above embodiments, and the system can be integrated in an unmanned vehicle. The method specifically includes the following steps:
[0077] S710. Acquire first obstacle information in the driving environment through a first preset number of lidars.
[0078] Wherein, lidar may refer to a radar system that emits laser beams to detect characteristic quantities such as the position and speed of target obstacles in the driving environment. The first preset number can be one or more, and its spec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More