PID control parameter setting method based on stability margin and dynamic response index
A technology of stability margin and control parameters, applied in the field of PID control, can solve the problems of unstable control system, unexpected closed-loop control performance, and inability to fully guarantee the stability of the closed-loop control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to these embodiments.
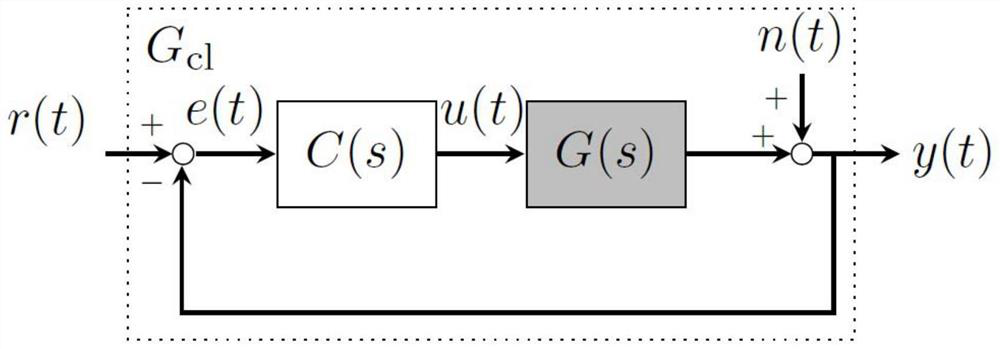
[0059] The basic idea of the invention is to correlate the stability margin, the PID control parameters and their dynamic response performance indexes, and calculate the optimal PID control parameters. For the three parameters of the PID controller in the closed-loop control system, the ratio K c , integration time T i , Differential time T d At the same time, it is adjusted so that the control performance of the overall closed-loop control system after the controller is put into operation meets the user's control requirements for dynamic response performance indicators.
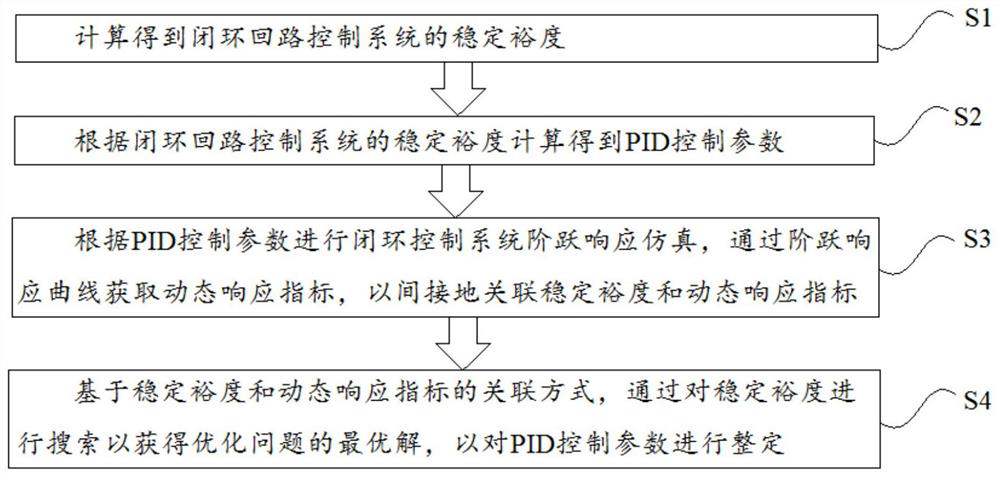
[0060]Based on the above inventive concepts, this embodiment proposes a PID control parameter tuning method based on stability margin and dynamic response index, which is applied to a closed-loop control sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



