

A joint optimization method and system for flight speed and trajectory
A technology of flight speed and joint optimization, applied in general control systems, control/regulation systems, and simultaneous control of multiple variables.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0183] As an embodiment, the method of the present invention also includes:
[0184] Step S9: Calculate the minimum flight total energy consumption according to the optimal flight parameters, the specific formula is:
[0185]
[0186] Among them, E is the minimum total flight energy consumption, g is the acceleration of gravity, c 1 =ρC D0 S / 2 and c 2 = 2W 2 / [(πe 0 A R )ρS], ρ means air density, C D0 Indicates zero-lift drag coefficient, S indicates wing area, e 0 is the wingspan efficiency, W represents the overall weight of the UAV, and A R represents the aspect ratio of the drone's wing, and are the optimal flight radius, optimal flight speed, and optimal flight duration of the UAV in mode 1, respectively, and are the optimal flight speed and optimal flight time of UAV flying in mode 2, respectively, and are the optimal flight radius, optimal flight speed, and optimal flight duration of UAV flying in mode 3, respectively.
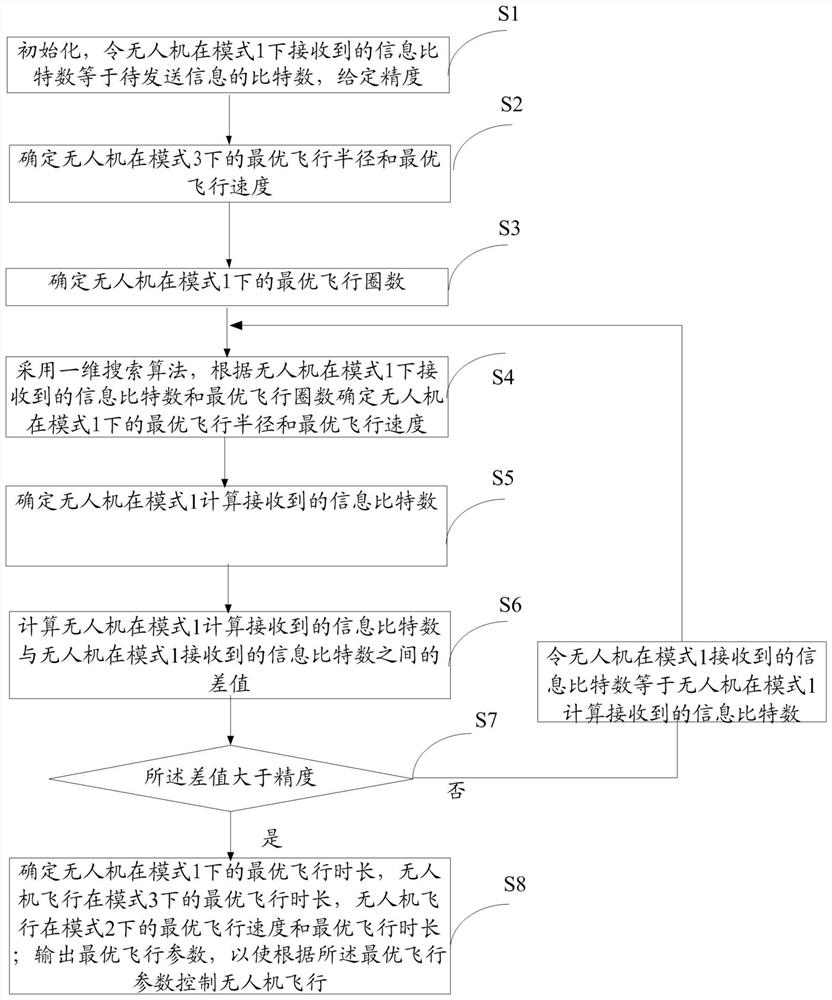
[0187]Step S1: Initialize,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More