

Semi-direct-drive-driver-based lower limb rehabilitation robot and control method therefor
A rehabilitation robot and drive technology, applied in the field of rehabilitation robots, can solve problems such as unsound lower limb rehabilitation, unsatisfactory rehabilitation effect, and inability to meet the needs of patients' ankle joint rehabilitation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Obviously, the described embodiments are part of the present invention Examples, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
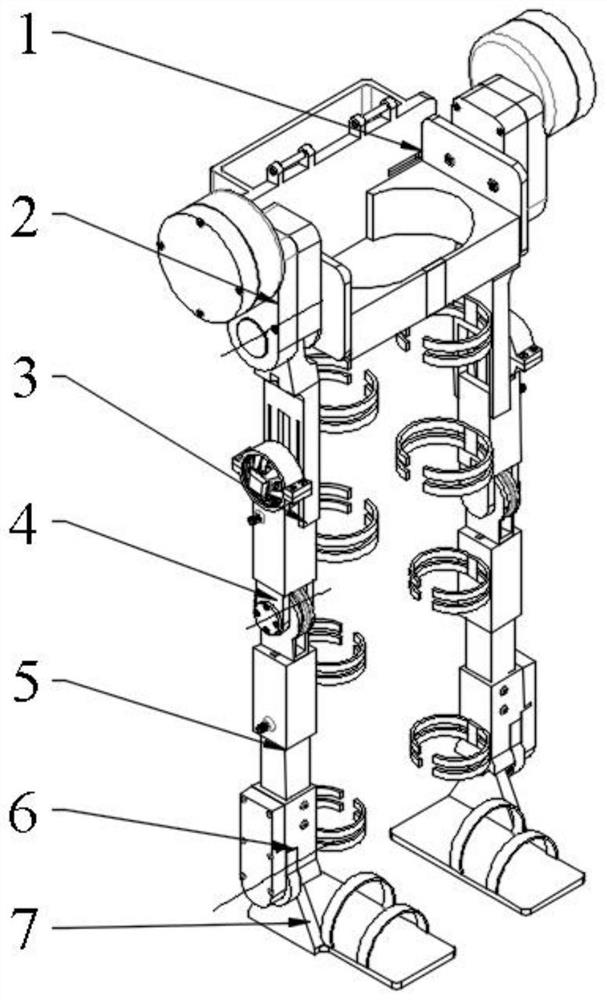
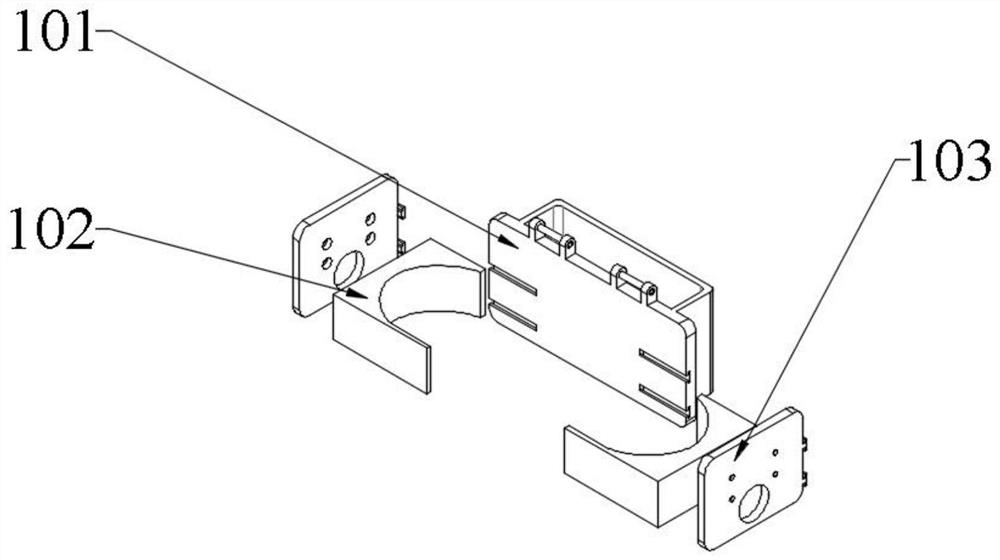
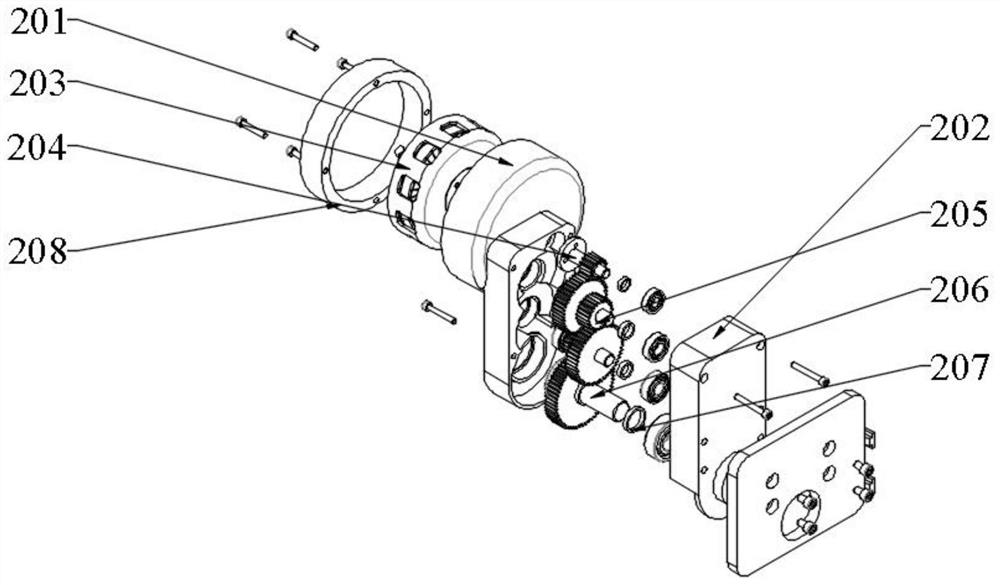
[0069] Such as Figure 1 to Figure 7 As shown, its structural relationship is: including the waist adjustment structure 1 and two thigh adjustment structures 3, two calf adjustment structures 5 and two feet that are symmetrically rotated and connected to both sides of the waist adjustment structure 1 and sequentially rotated from top to bottom. The bottom plate 7, the waist adju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More