A UAV airborne multi-axis gimbal debugging platform
A technology of drones and gimbals, applied in the field of drones, can solve the problems of drones stopping in the air, affecting the appearance of drones, falling, etc., to achieve the effect of ensuring flight reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
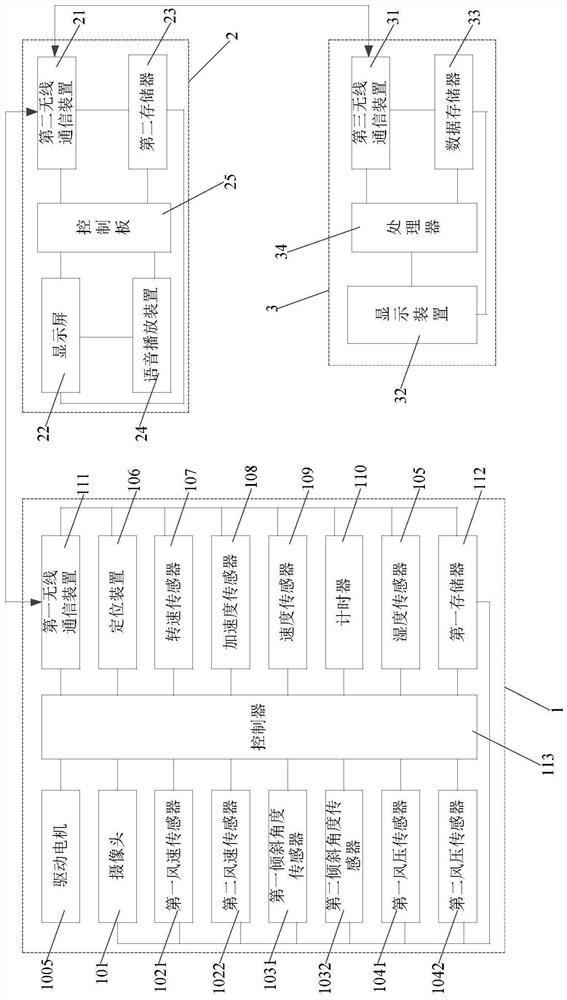
[0037] see figure 2 As shown, this embodiment provides a UAV airborne multi-axis gimbal debugging platform, including:
[0038] At least one drone 1 having:
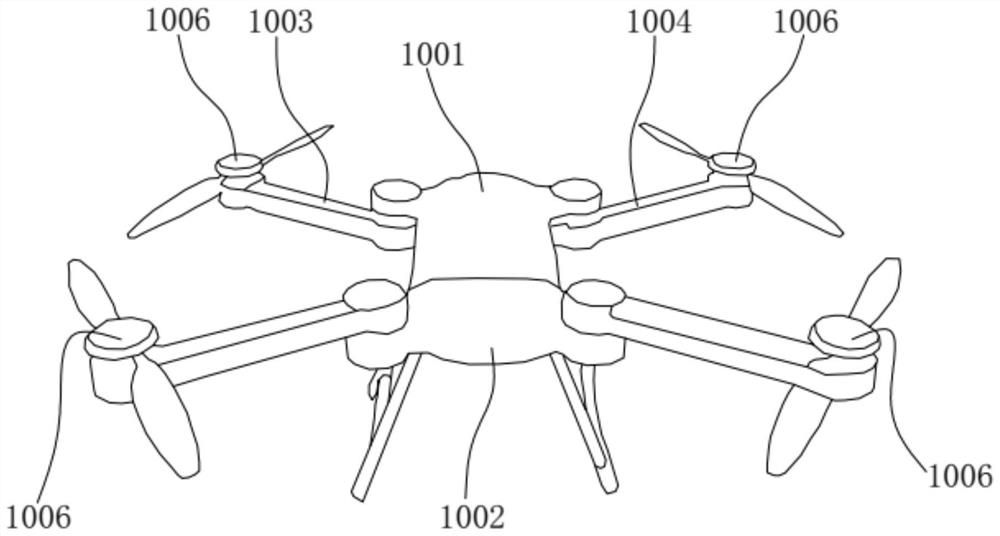
[0039] The drone fuselage 100 has a fuselage main body 1001, a nose 1002 and a left wing 1003 and a right wing 1004 respectively arranged on both sides of the fuselage main body 1001. drive the rotating propeller 1006;
[0040] The camera 101 is rotatably arranged on the main body 1001 of the fuselage, and the camera 101 can collect images and video information of the front preset field of view under the meteorological environment where the drone is located;
[0041] The first wind speed sensor 1021 is arranged on the left wing 1003; the first wind speed sensor 1021 is responsible for detecting the wind speed data received by the left wing 1003 of the drone;
[0042] The second wind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More