

DC motor speed-position double closed-loop anti-disturbance pid control method and system
A DC motor and control method technology, applied in electric controllers, controllers with specific characteristics, etc., can solve the problems of complex design methods and difficult applications of high-order controllers and nonlinear controllers, and achieve convenient and extensive design. Apply, overcome the effect of disturbance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
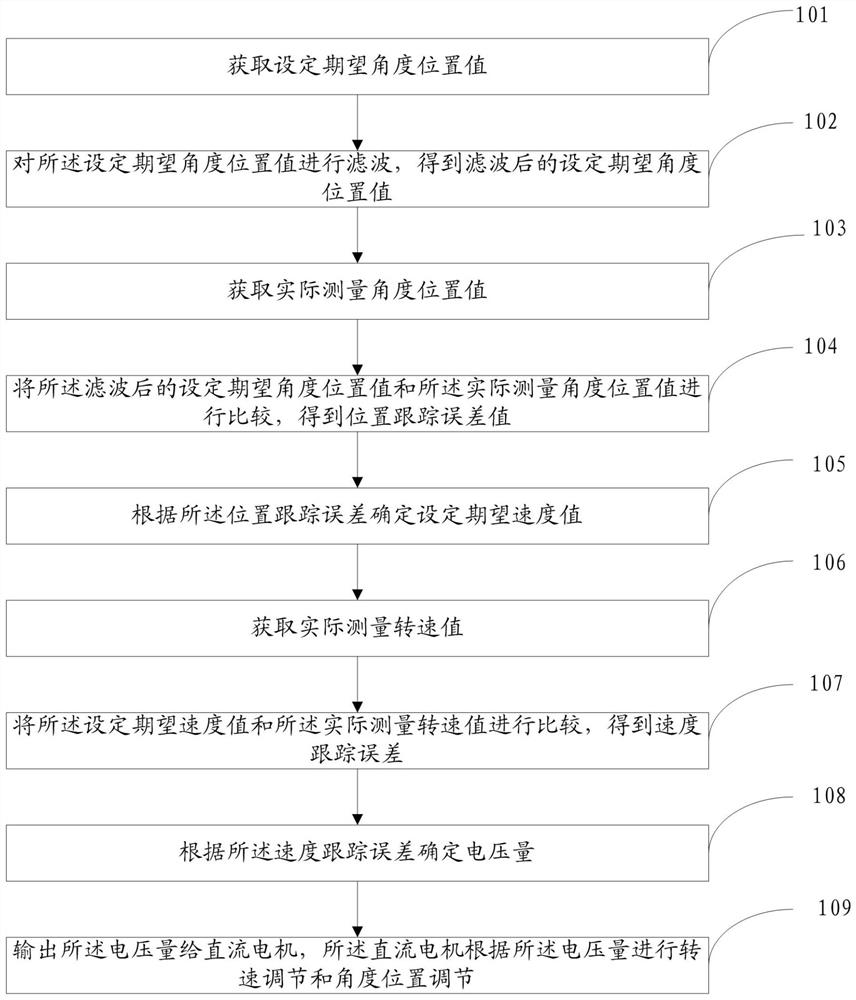
[0050] figure 1 It is a flowchart of Embodiment 1 of the speed-position double-closed-loop anti-disturbance PID control method for a DC motor of the present invention. see figure 1 , the DC motor speed-position double closed-loop anti-disturbance PID control method includes:
[0051] Step 101: Obtain a set desired angle position value.
[0052] Step 102: Filtering the set desired angular position value to obtain a filtered set desired angular position value.
[0053] This step 102 specifically includes:
[0054] according to Calculate the filtered set desired angular position value in, f y (s) is the filter, ω f is the filter bandwidth, s is the complex frequency domain variable commonly used in control theory, y * (s) is to set the desired angular position value.
[0055] Step 103: Obtain the actual measured angle position value.
[0056] Step 104: Comparing the filtered set desired angular position value with the actual measured angular position value to obtain...
Embodiment 2
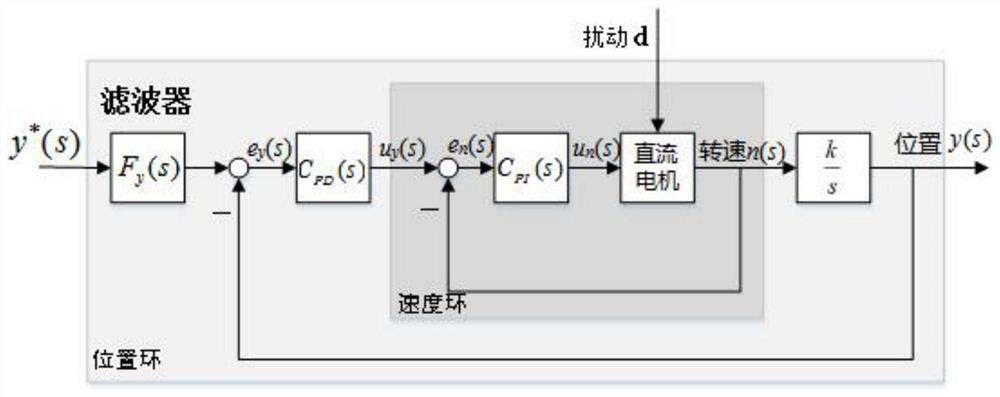
[0068] figure 2 It is a schematic diagram of the control process of the speed-position double-closed-loop control in Embodiment 2 of the speed-position double-closed-loop anti-disturbance PID control method for a DC motor of the present invention. see figure 2 , in the DC motor speed-position double closed-loop anti-disturbance PID control method, the control process of the speed-position double closed-loop control specifically includes:
[0069] Set desired angular position y * (s), after filter F y After (s), it is compared with the actual measured position y(s) to form a position tracking error e y (s), through the anti-disturbance PD controller C PD After (s), get the expected speed value u y (s), compared with the actual measured speed n(s), forming a speed tracking error e n (s), through the anti-disturbance PI controller C PI After (s), the control quantity u is formed n (s) (voltage amount), and finally form the speed regulation and position regulation of the...
Embodiment 3
[0096] Figure 6 It is a structural diagram of Embodiment 3 of the DC motor speed-position double closed-loop anti-disturbance PID control system of the present invention. see Figure 6 , the DC motor speed-position double closed-loop anti-disturbance PID control system includes a filter 601 , a first comparator 602 , a position loop anti-disturbance PD controller 603 , a second comparator 604 and a speed loop anti-disturbance PI controller 605 .
[0097] The filter 601 is used to filter the input desired set angle position value, and output the filtered set expected angle position value.
[0098] The filter 601 specifically includes:
[0099] filtering unit for the Calculate the filtered set desired angular position value in, f y (s) is the filter, ω f is the filter bandwidth, s is the complex frequency domain variable commonly used in control theory, y * (s) is to set the desired angular position value.
[0100] The first comparator 602 is connected to the filter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More