

A six-dimensional force sensor
A six-dimensional force sensor and sensor technology, applied in the field of sensors, can solve the problems of measuring force/torque with a large change in coupling error, and achieve the effects of small inter-dimensional coupling, simple and clear force mapping relationship, and reducing temperature drift error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the application with reference to the drawings in the embodiments of the application. Apparently, the described embodiments are only some of the embodiments of the application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
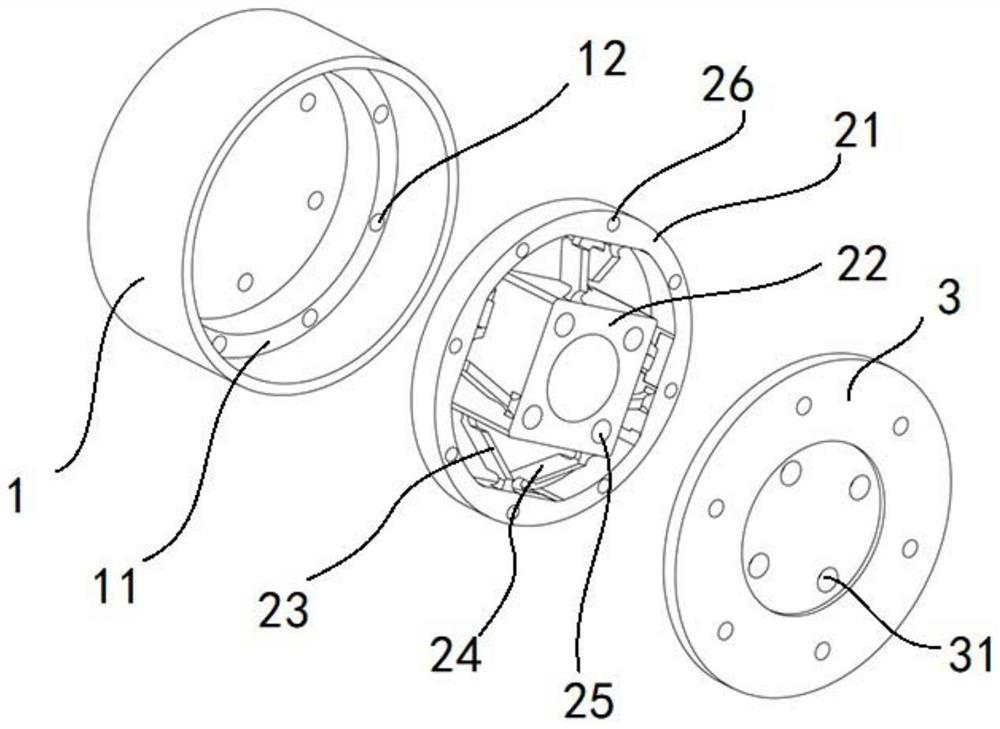
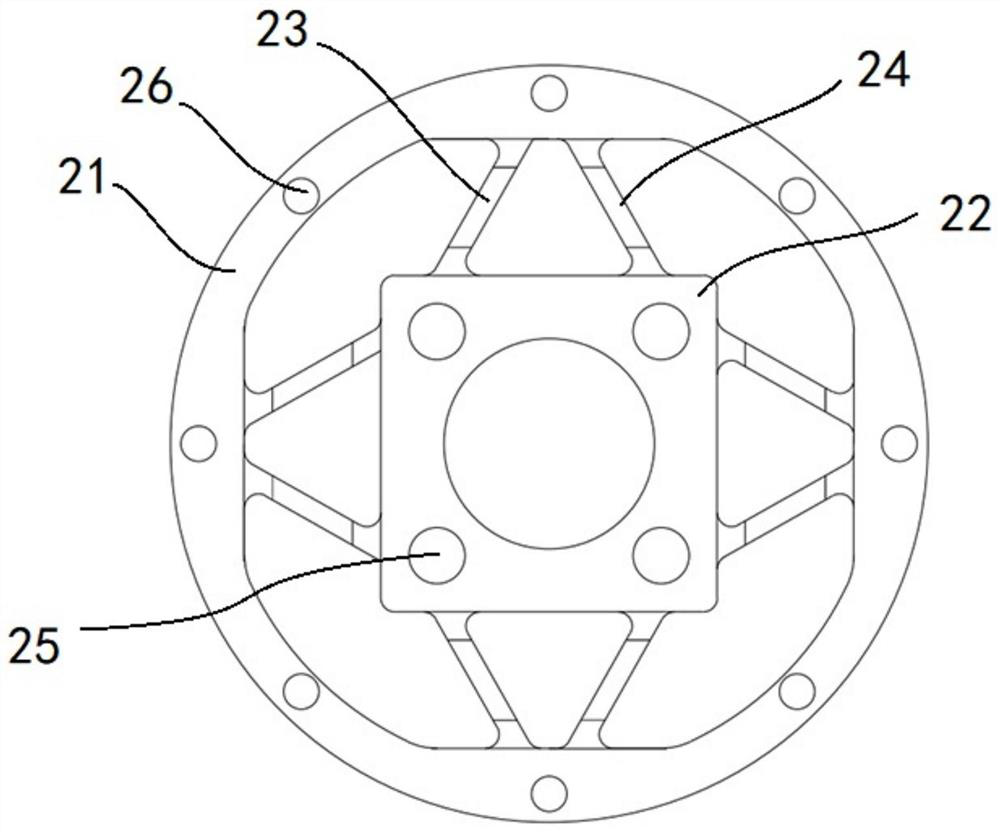
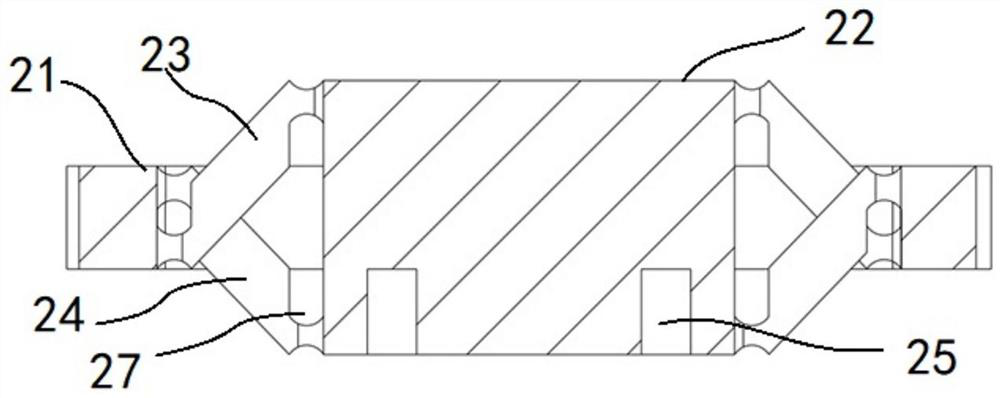
[0036] Such as Figure 1-Figure 6 As shown, the application proposes a six-dimensional force sensor, including: a housing 1 and a base 3, and also includes:
[0037] The main body of the sensor, the main body of the sensor includes: a moving platform 21, a support body 22 and multiple groups of stress rods, the multiple groups of stress rods are in groups of two, and the circular array is arranged on the outer side of the support body; each group of stress rods includes a first The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More