

Model prediction and inversion control method for manipulating mechanical arm
A technology of inversion control and model prediction, applied in the field of robotics, can solve the problems of large influence of human subjective factors, difficult dynamic performance and steady state performance, and poor robustness of the parameters of the manipulator body.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
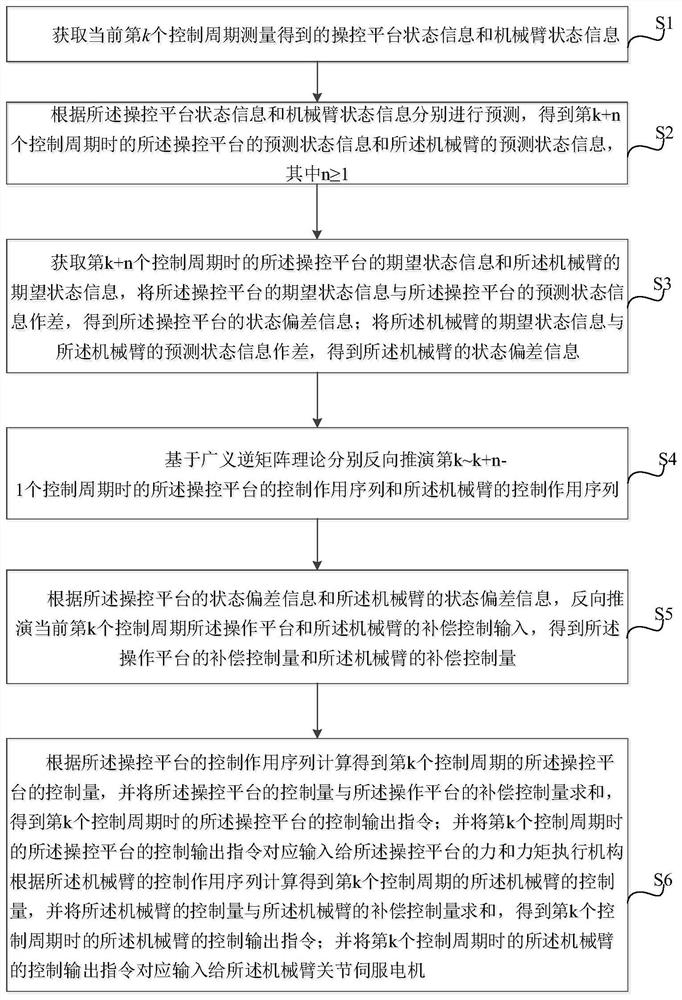
[0064] The following is attached figure 1 and Specific Embodiments A model prediction and inversion control method for a manipulator provided by the present invention will be further described in detail. The advantages and features of the present invention will become clearer from the following description. Any modification of structure, change of proportional relationship or adjustment of size shall still fall within the scope covered by the technical contents disclosed in the present invention without affecting the functions and objectives of the present invention.
[0065] It should be noted that in this article, relational terms such as first and second are only used to distinguish one entity or operation from another entity or operation, and do not necessarily require or imply that there is a relationship between these entities or operations. There is no such actual relationship or order between them. Furthermore, the term "comprises", "comprises" or any other variation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More