

A UAV control method for tracking maneuvering targets
A technology of unmanned aerial vehicles and multi-rotor unmanned aerial vehicles, which is applied in the field of UAV control methods and systems for tracking maneuvering targets, can solve the problems of large tracking error, long calculation time, large tracking error, etc., and achieve fast convergence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
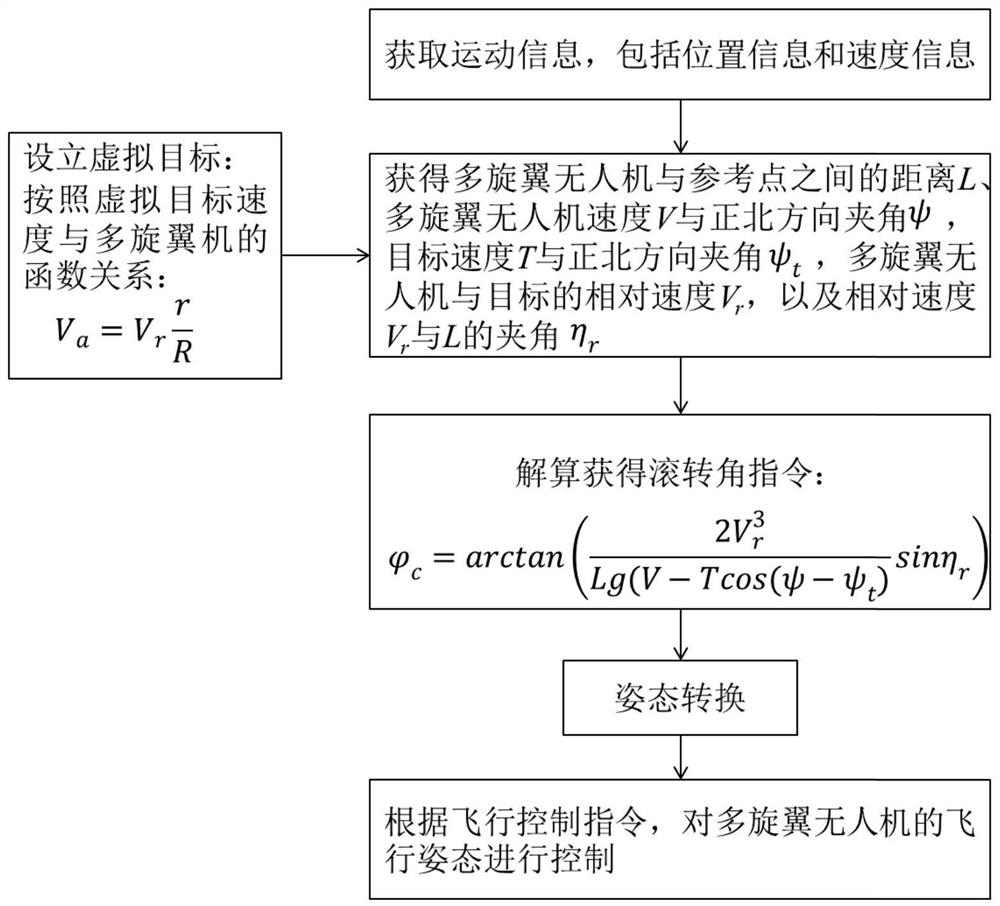
[0070] Simulation under the environment of linux system, the conditions are set as follows: the simulation guidance period is 1s, L=120m, Standoff tracking distance R d =500m, UAV initial speed V=27m / s, target initial speed T=10m / s. The angle between the speed V of the multi-rotor UAV and the direction of true north ψ = 135°, the angle between the target speed T and the direction of true north ψ t =90°, the gravitational acceleration takes g=9.8m / s 2 . Virtual target speed V a =20m / s, the relative distance from the UAV is R=50m.
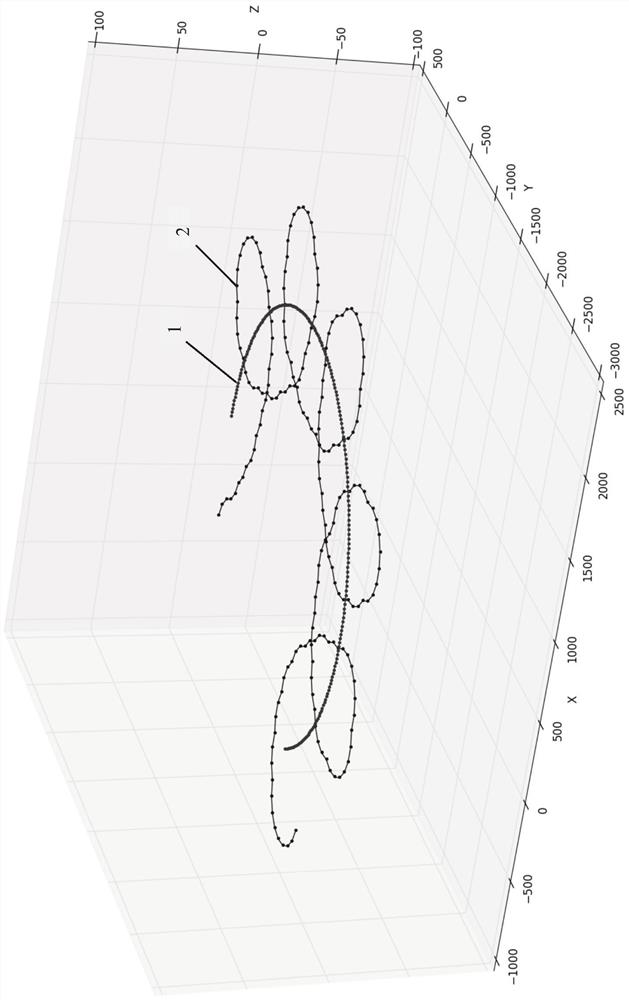
[0071] figure 2 In the three-dimensional coordinate system, the three axes are X, Y, and Z axes, the starting position of the drone is at (0,0,0), the starting position of the target is at (600,0,0), and the dotted line 1 is the target The maneuvering trajectory of the flight, the solid line 2 is the trajectory of the UAV, and the target has a clockwise angular velocity ψ t = 1.2° / s uniform circular motion.
[0072] When the improved referenc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More