

A cantilevered robotic arm
A robotic arm and cantilever technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inability to meet, reduce the overturning application of the robotic arm, and the difficulty of conveying oblique materials with the robotic arm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
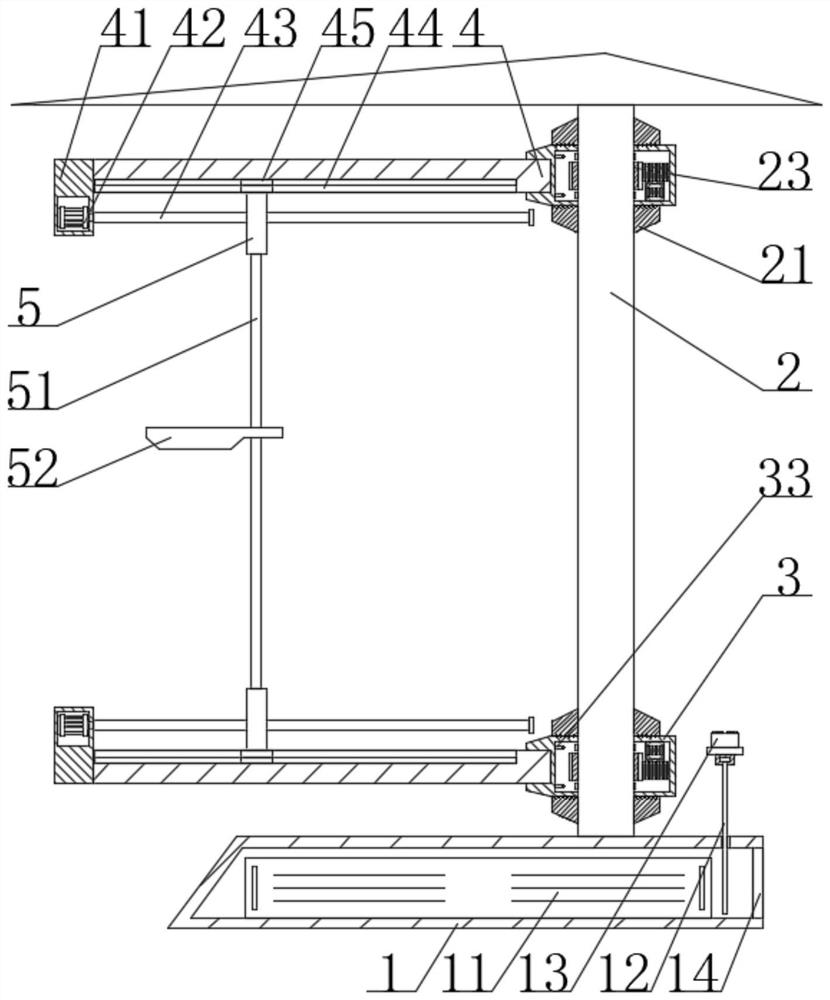
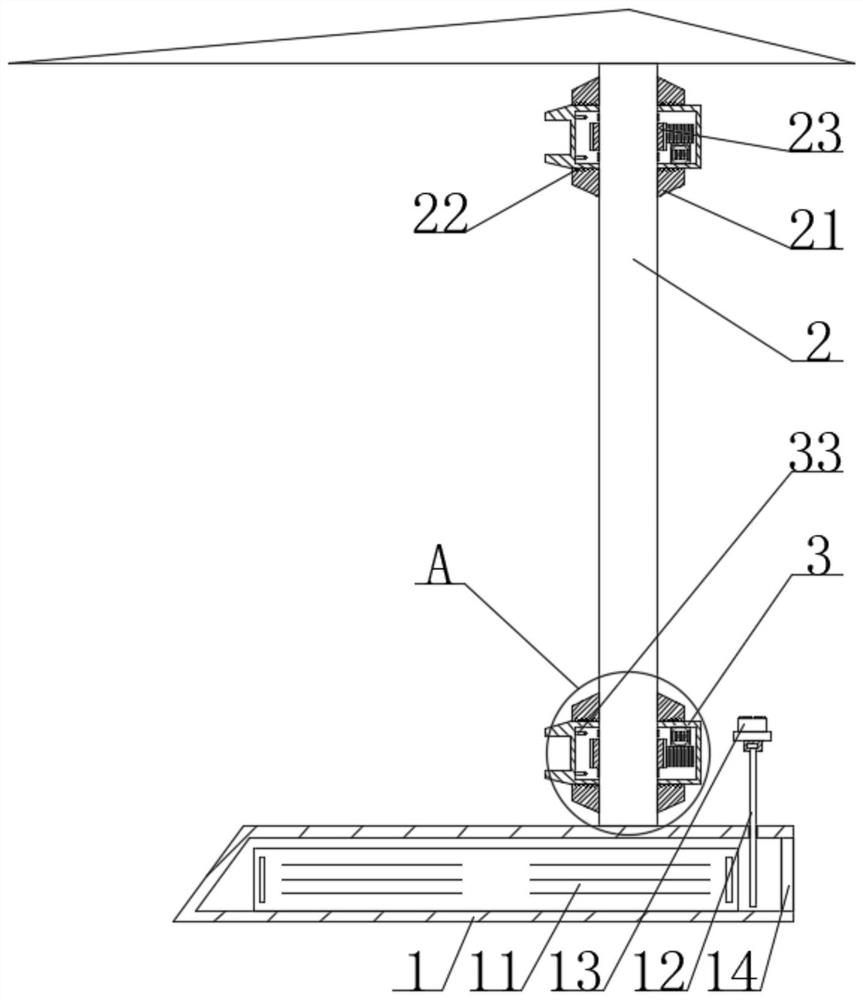
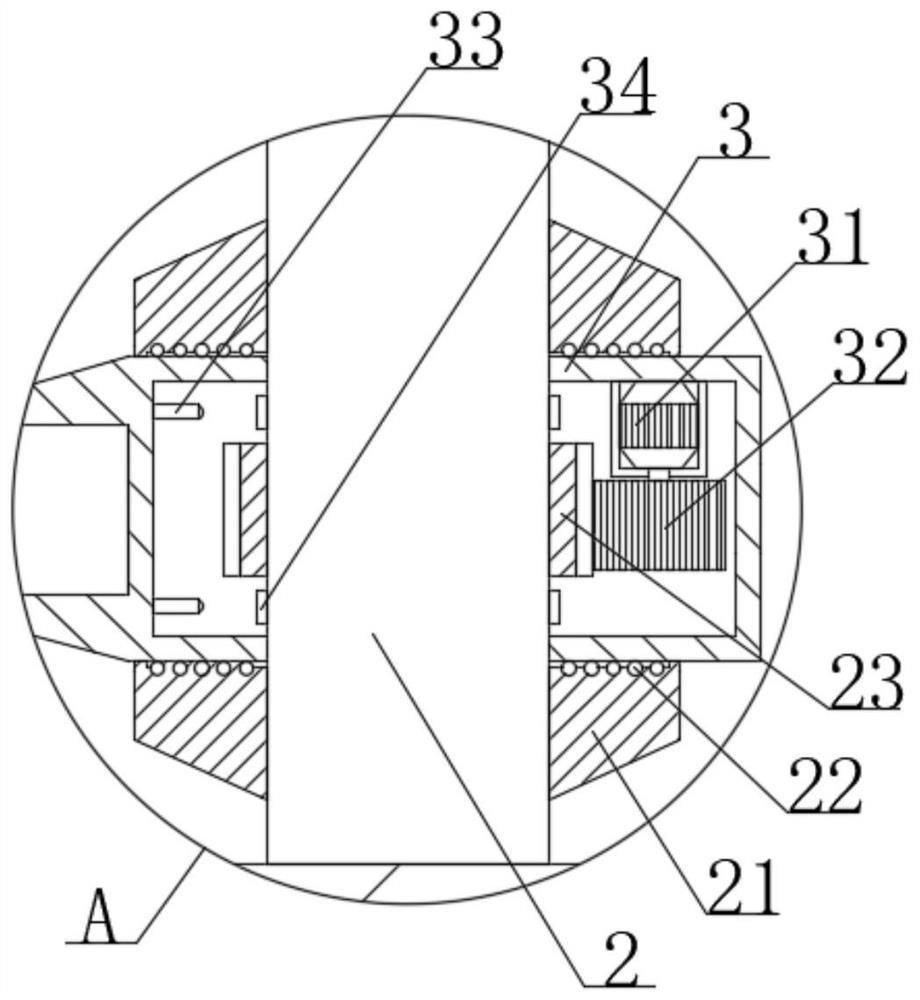
[0023] see Figure 1-5 , the present invention provides a technical solution: a cantilever mechanical arm, including a base 1, a support column 2 and a cantilever frame 4, the base 1 is in a right-angled trapezoidal structure, and the lower surface of the base 1 is provided with anti-slip lines, the base 1 The middle part of the lower surface of the inner wall is fixedly connected with a battery 11 by bolts, and the battery 11 can effectively provide electric energy. The middle part of the upper surface of the base 1 near the edge of one end is threadedly inserted with a screw rod 12, and the outer top of the screw rod 12 passes through a bearing The controller 13 is rotatably connected, and the position of the controller 13 on the base 1 can be effectively driven to lift through the screw rod 12, so as to facilitate the manipulation by users at different elevated positions. The middle part of one end of the base 1 is fixed and connected with a cover by bolts Plate 14, a seali...
Embodiment 2
[0025] see Figure 1-5, the present invention provides a technical solution: a cantilever mechanical arm, including a base 1, a support column 2 and a cantilever frame 4, the base 1 is in a right-angled trapezoidal structure, and the lower surface of the base 1 is provided with anti-slip lines, the base 1 The middle part of the lower surface of the inner wall is fixedly connected with a battery 11 by bolts, and the battery 11 can effectively provide electric energy. The middle part of the upper surface of the base 1 near the edge of one end is threadedly inserted with a screw rod 12, and the outer top of the screw rod 12 passes through a bearing The controller 13 is rotatably connected, and the position of the controller 13 on the base 1 can be effectively driven to lift through the screw rod 12, so as to facilitate the manipulation by users at different elevated positions. The middle part of one end of the base 1 is fixed and connected with a cover by bolts Plate 14, a sealin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More