

A road full traversal cleaning path planning method for unmanned sweeping vehicles
A path planning and cleaning vehicle technology, applied in the field of robots, to achieve the effect of no retrograde risk, improve the scope of application, and reduce the area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] A road full traversal cleaning path planning method for unmanned sweeping vehicles, such as figure 1 , including the following steps:
[0056] 1. Classification of road types
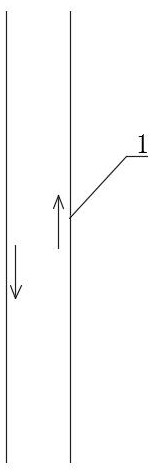
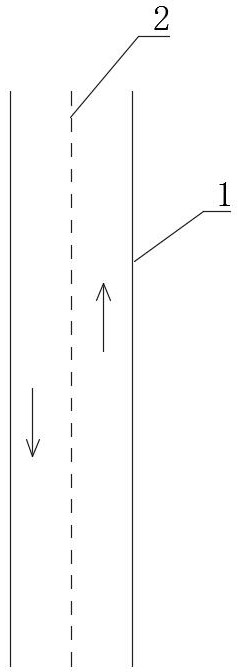
[0057] Divide road types into single-lane roads, two-lane roads and multi-lane roads; unmanned sweepers judge whether the road to be cleaned is a single-lane road or a two-lane road based on high-precision maps and on-site visual recognition (such as its own visual sensor, etc.) Or multi-lane roads, according to the type of road to take the corresponding path planning method. High-resolution maps are pre-scanned.
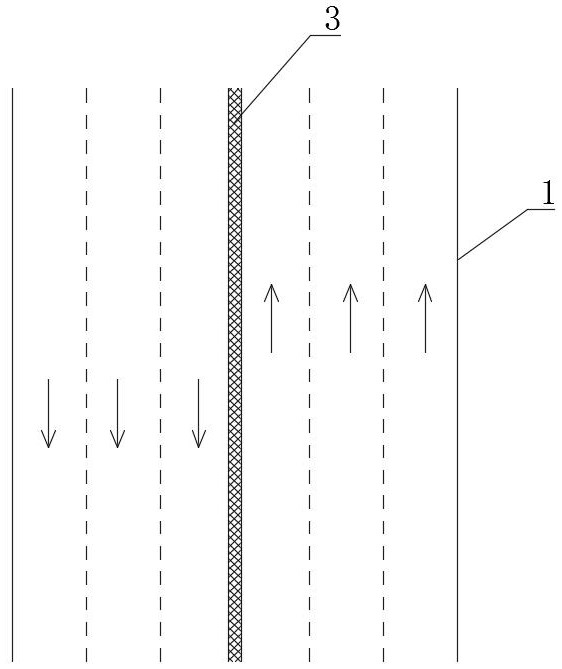
[0058] The invention mainly plans and cleans urban roads, and classifies urban roads into single-lane, double-lane and multi-lane. Among them, the multi-lane is similar to the double-lane situation, except that the median strip is replaced by the middle lane line, which can be regarded as an extension of the double-lane, so the multi-lane processing method is similar to the dual-lan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More