

Sweeping robot control method, device and system and storage medium
A technology of a sweeping robot and a control method, applied in the field of sweeping robots, can solve the problems of low coverage and low cleaning efficiency of sweeping robots, and achieve the effects of avoiding repeated cleaning, improving cleaning efficiency, and reducing missed areas.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] In order to solve the above-mentioned technical problems existing in the prior art, an embodiment of the present invention provides a control method for a sweeping robot.
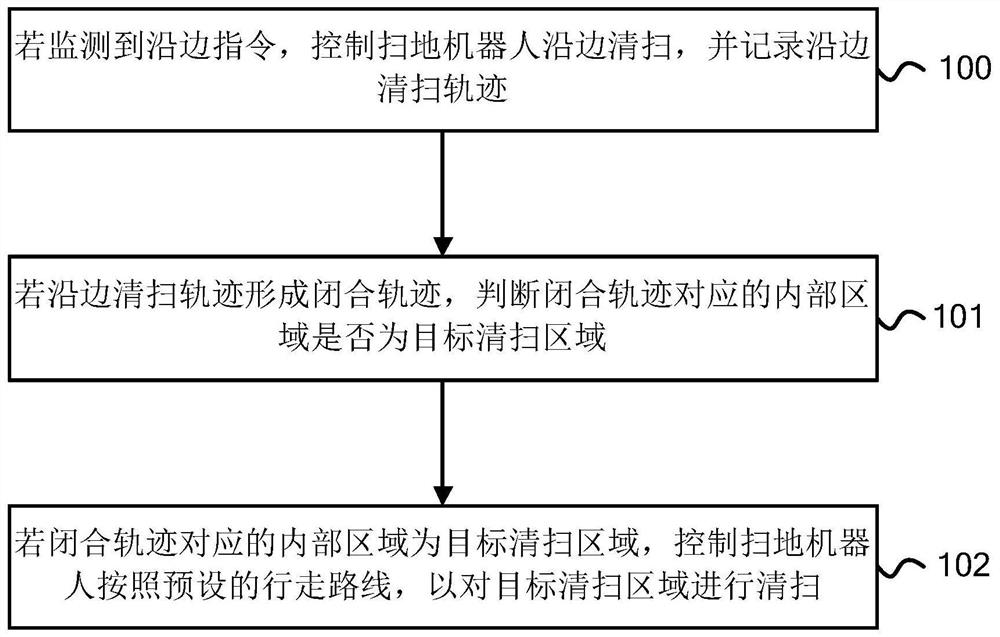
[0043] figure 1 It is a flow chart of an embodiment of the control method of the sweeping robot of the present invention, such as figure 1 As shown, the control method of the sweeping robot in this embodiment may specifically include the following steps:
[0044] 100. If an instruction along the edge is detected, control the sweeping robot to clean along the edge, and record the cleaning track along the edge;
[0045] Usually, the outline formed by the edge of a certain space is the maximum coverage of the space. Therefore, in this embodiment, in order to improve the coverage of the sweeping robot, when cleaning is required, an edge command can be generated. In this way, if the monitoring When you receive the command along the edge, you can control the sweeping robot to find the edge, so that it ca...
Embodiment 2
[0069] In order to solve the above-mentioned technical problems existing in the prior art, an embodiment of the present invention provides a control device for a sweeping robot.
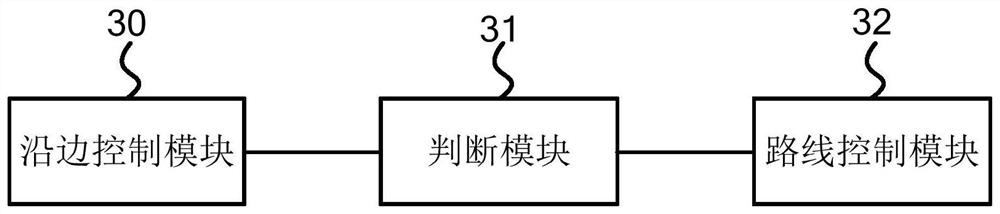
[0070] image 3 It is a structural schematic diagram of an embodiment of the control device of the sweeping robot of the present invention. Such as image 3 As shown, the control device of the sweeping robot in this embodiment may include an edge control module 30 , a judging module 31 and a route control module 32 .
[0071] The edge control module 30 is used to control the sweeping robot to clean along the edge if an edge edge instruction is detected, and record the edge cleaning trajectory;
[0072] A judging module 31, configured to determine whether the internal area corresponding to the closed track is a target cleaning area if the track along the side is cleaned to form a closed track;
[0073] Specifically, the judging module 31 is also used to determine the distance between the starting p...
Embodiment 3
[0080] In order to solve the above-mentioned technical problems existing in the prior art, an embodiment of the present invention provides a control system for a sweeping robot.
[0081] image 3 It is a structural schematic diagram of an embodiment of the control system of the sweeping robot of the present invention, such as image 3 As shown, the control system of the cleaning robot in this embodiment may include a remote control device 41 and a controller 40 provided in the cleaning robot. The remote control device 41 in this embodiment may include a server 411 and a terminal 412 , and the controller 40 is connected to the terminal 412 through the server 411 to realize data interaction between the controller 40 and the terminal 412 .
[0082]In this embodiment, the controller 40 arranged in the sweeping robot is used to control the sweeping robot to clean along the edge and record the sweeping track along the edge if an edge-wise instruction is detected; the remote control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More