Rear location detection mechanism for computer numeric control bending robot
A detection mechanism and robot technology, applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problem of inability to judge the position and position of the sheet metal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
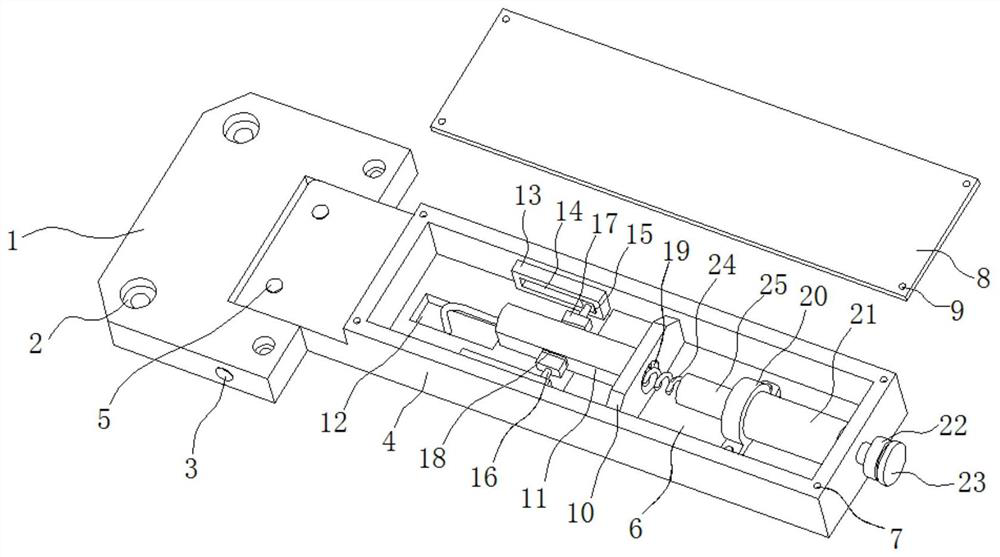
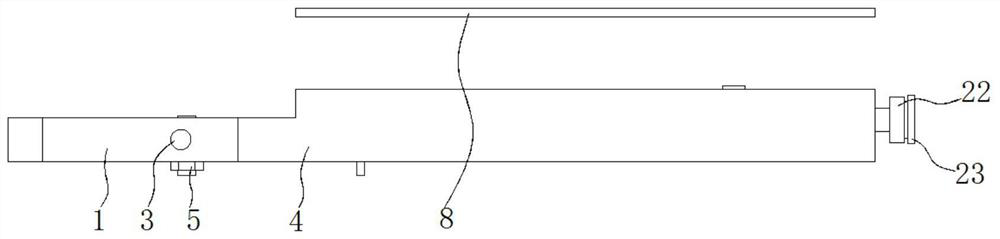
[0021] refer to Figure 1-4 , a rear positioning position detection mechanism of a numerically controlled bending robot, including a fixing part, a mounting support 4 is rotatably connected to the fixing part, and a horizontal adjustment top wire 5 is connected to the side of the mounting support 4 close to the fixing part, and the installation The upper end of the bearing 4 is provided with a groove 6, and a displacement sensor bracket 10 is connected in the groove 6, and a high-precision displacement sensor 11 is connected on the displacement sensor bracket 10, and a strip-shaped hole 12 is provided at the bottom of the groove 6. The hole 12 is convenient for the high-precision displacement sensor 11 to be connected to the robot host computer through a wire, and the inner two sides of the groove 6 are connected with a limit mechanism, and one side of each limit mechanism is in contact with the high-precision displacement sensor 11, and the limit mechanism is The high-precisi...
Embodiment 2
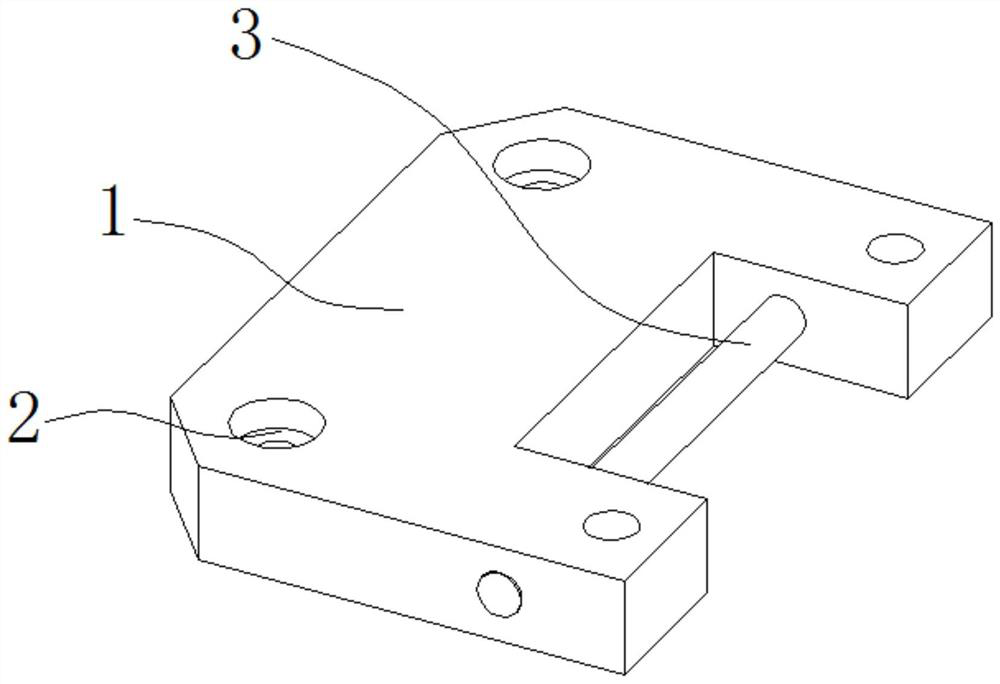
[0024] refer to Figure 1-4 , as another preferred embodiment of the present invention, the difference from Embodiment 1 is that the fixing member includes a fixing seat 1, and both sides of the upper end of the fixing seat 1 are provided with mounting holes 2, and a latch 3 is inserted on the fixing seat 1, and the latch 3 Connect the mounting support 4, and the bolts pass through the mounting hole 2 to fix the fixing seat 1 on the back gauge mechanism of the bending machine.
Embodiment 3
[0026] refer to Figure 1-4 , as another preferred embodiment of the present invention, the difference from Embodiment 1 is that the limit mechanism includes a fixed frame 13, the fixed frame 13 is connected to the mounting support 4, and a chute 14 is provided on the fixed frame 13, and the chute 14 can be The slide block 15 is connected with the slide block 15, and the slide block 15 is connected with a fixed rod 16, and the end of the fixed rod 16 away from the slide block 15 is connected with a limit block 17, and the limit block 17 is connected with an elastic pad 18, and one side of the elastic pad 18 In contact with the high-precision displacement sensor 11, the movement of the high-precision displacement sensor 11 drives the limit block 17 to move, and the limit block 17 drives the slider 15 to slide in the chute 14 through the fixed rod 16, and under the limit of the limit block 17 , the high-precision displacement sensor 11 moves smoothly in the horizontal direction....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com