Design method of collaborative unmanned aerial vehicle data acquisition system based on physical layer security
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of data acquisition system and physical layer security, which is used in wireless communication, power management, interference to communication, etc.
Active Publication Date: 2021-02-19
DALIAN UNIV OF TECH +1
View PDF4 Cites 11 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The purpose of the invention is to solve the problem of energy efficiency in the UAV data acquisition system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
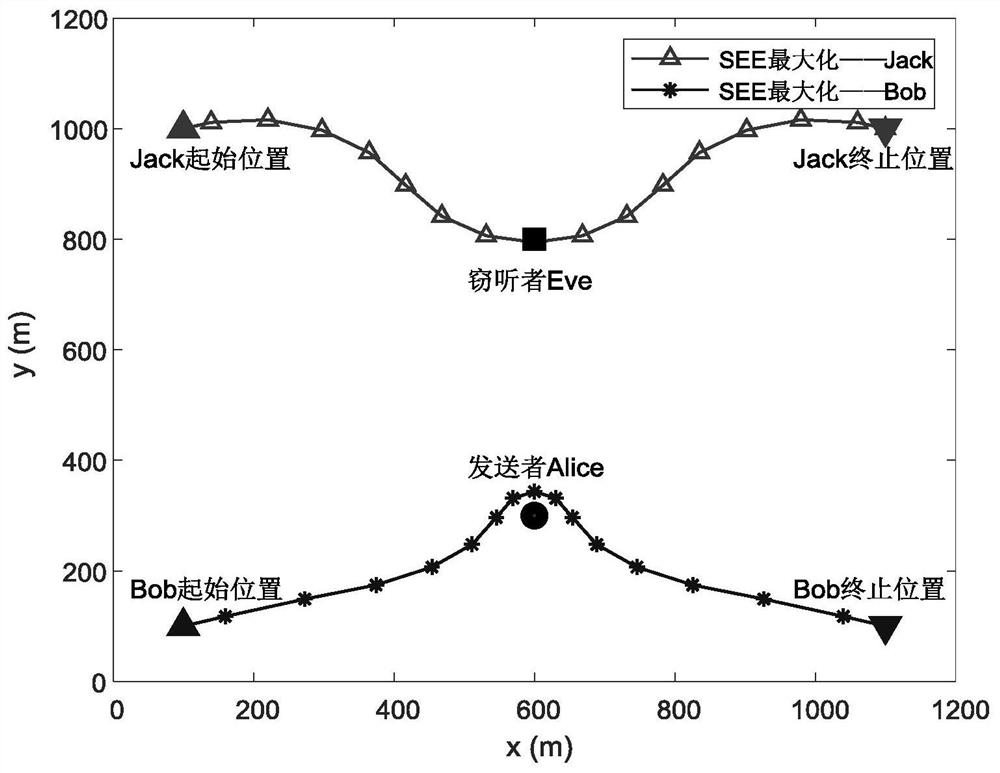
[0077] Firstly, an implementation mode is given when there is only one node on the ground, that is, K=1. Since there is only one node, the scheduling variable does not need to be optimized, which is similar to military information transmission. Assuming that the starting position and the ending position of the receiver and the jammer are different, within a mission period, only one-way flight is enough. Specific steps are as follows:
[0078] Assume the emitter's position is w k =[800,600] T ; The center of the eavesdropper's estimated position is w e =[400,600] T ;Radius of the eavesdropper's estimated position circle r e =20m. The starting position and ending position of the drone Bob are [100,100] respectively T and [1100,100] T ; The start position and end position of the UAV Jack are [100,1000] respectively T and [1100,1000] T . Some fixed parameters are set as follows: σ 2 =-110dBm, d 0 = 1m, ρ 0 =-60dB, B w =1MHz, α=3, H=150m, V max =50m / s, a max =3m / s ...
Embodiment 2
[0082] Considering the actual situation, the UAV may need to collect information of multiple nodes on the ground. In this example, K=3. Assuming that the starting position and ending position of the receiver and the jammer are the same, the trajectory of the UAV becomes a closed loop, and all users can be visited sequentially. where w k =[1000,1000; 200,600; 900,150] T ;w e =[500,500] T . This section mainly compares the performance of the following five schemes, scheme 1: maximizing safe energy efficiency. Scheme 2: Maximize the average security rate. Scheme 3: Maximize the average safe speed with propulsion power limitation.
[0083] Figure 4 The optimization trajectories of different T maximizing safe energy efficiency schemes are given in . When T=100s, due to the limitation of the flight cycle, the UAV can only fly in a small circle area. In contrast, when T is 180s, Bob is more inclined to be close to the ground node and far away from the eavesdropper, so as to...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
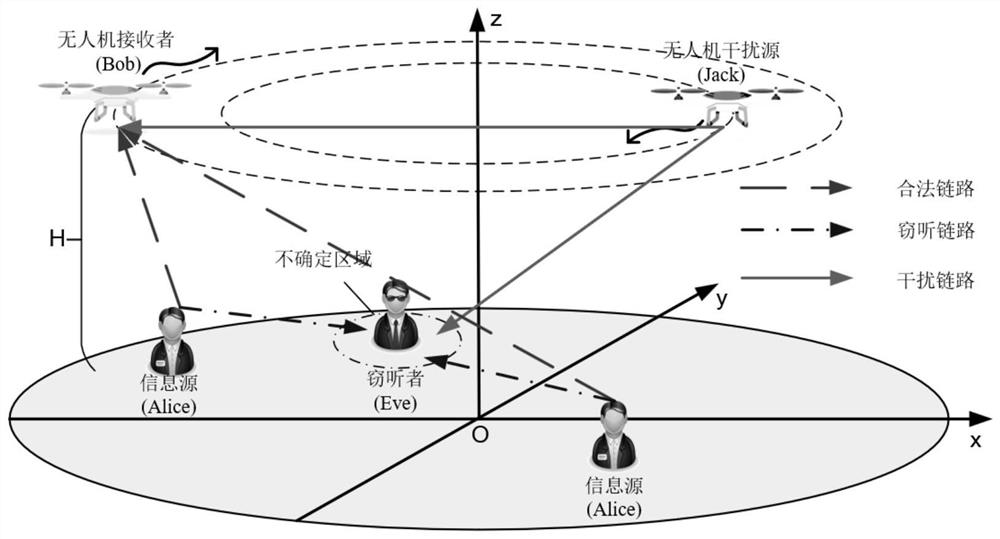
The invention provides a design method of a cooperative unmanned aerial vehicle data acquisitionsystem based on physical layer security, and belongs to the field of energy efficiency optimization ofunmanned aerial vehicle uplink communication. When the unmanned aerial vehicle collects information, a potential eavesdropper tries to monitor the transmitted information, and another interference unmanned aerial vehicle is set to realize cooperative communication by utilizing the sight distance characteristic of an air-ground link so as to improve the system security. Based on the model, the invention provides a design method for joint optimization of the unmanned aerial vehicle trajectory, the unmanned aerial vehicle speed, the information source transmitting power and node scheduling. The method can generate the optimal motion trajectory of the unmanned aerial vehicle according to model parameters to maximize the safety energy efficiency of the system.
Description
technical field [0001] The invention belongs to the field of energy efficiency optimization for uplink communication of UAVs, and relates to a design scheme for using dual UAVs to cooperate against malicious eavesdroppers, specifically referring to the joint optimization of UAV trajectory, Source transmit power and node scheduling methods, so as to maximize the energy efficiency of the system security. Background technique [0002] Unmanned Aerial Vehicle (UAV) has been widely used in military or commercial fields due to its advantages of low cost, high flexibility, and portability. With the rapid development of the Internet and the Internet of Things technology, people's demand for data transmission rates will increase hundreds of times. The idea of using drones to assist wireless communication will bring new challenges and development to traditional terrestrial cellular wireless communication systems. opportunity. UAV-assisted communication has many advantages. On the ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.




 Login to View More
Login to View More  Login to View More
Login to View More