

Space teleoperation mechanical arm on-orbit training system and method
A training system and robotic arm technology, applied in the field of space stations, can solve problems such as long deployment length, operator experience and judgment impact, time-consuming, etc., to achieve real visual feedback and increase the effect of training immersion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to better understand the above technical solutions, the technical solutions of the present application will be described in detail below through the accompanying drawings and specific examples. It should be understood that the embodiments of the present application and the specific features in the examples are detailed descriptions of the technical solutions of the present application, and It is not a limitation to the technical solutions of the present application, and the embodiments of the present application and the technical features in the embodiments can be combined without conflict.
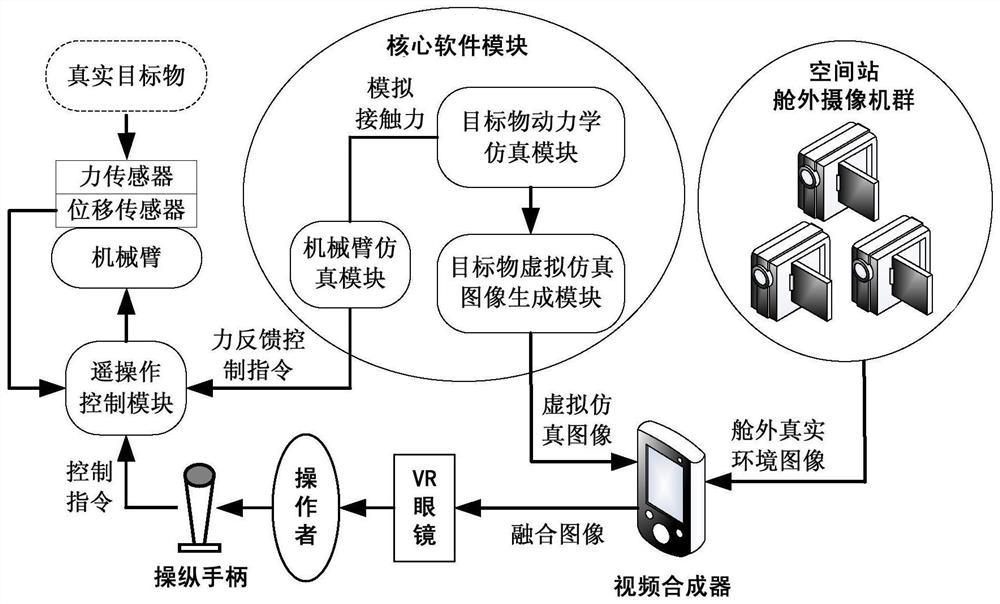
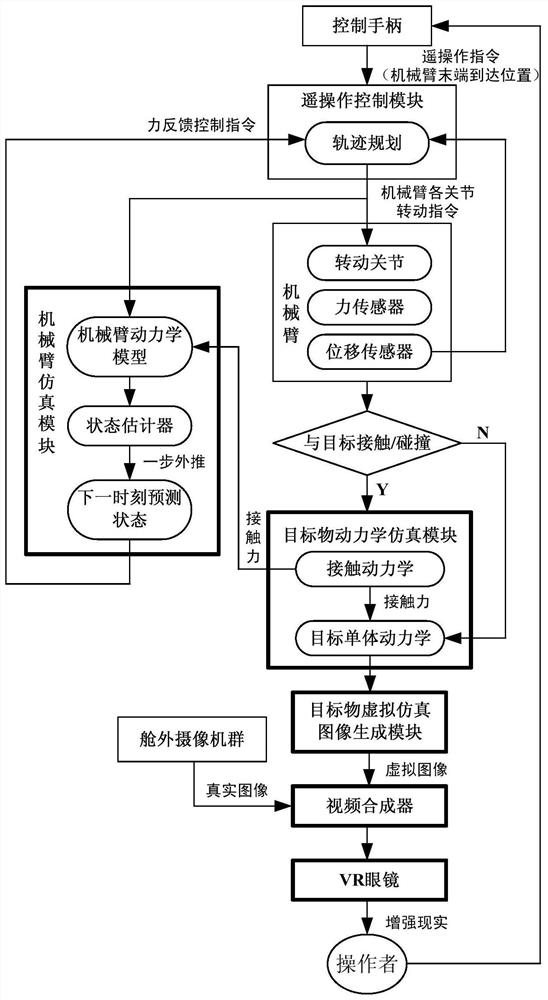
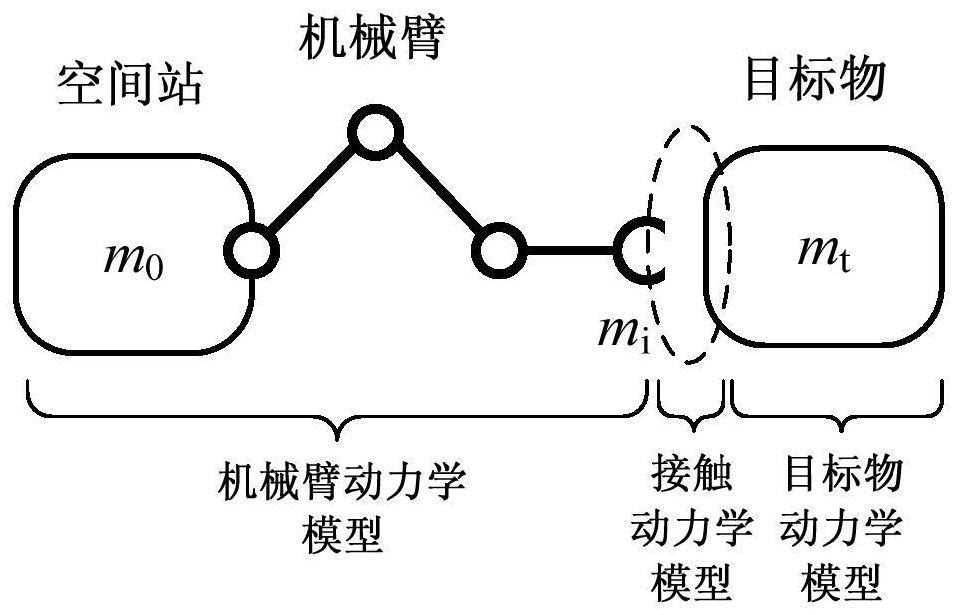
[0051] The following is a further detailed description of the on-orbit training system for the space teleoperated manipulator provided by the embodiment of the present application in conjunction with the accompanying drawings. The specific implementation methods may include (such as Figure 1~4 Shown): space station external camera, target dynamics simulation module, target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More