Ship formation path active coordination system and method considering maneuverability difference
A maneuverability and ship technology, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as small channel size, complex water and sand movement conditions, and limited ship navigation conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
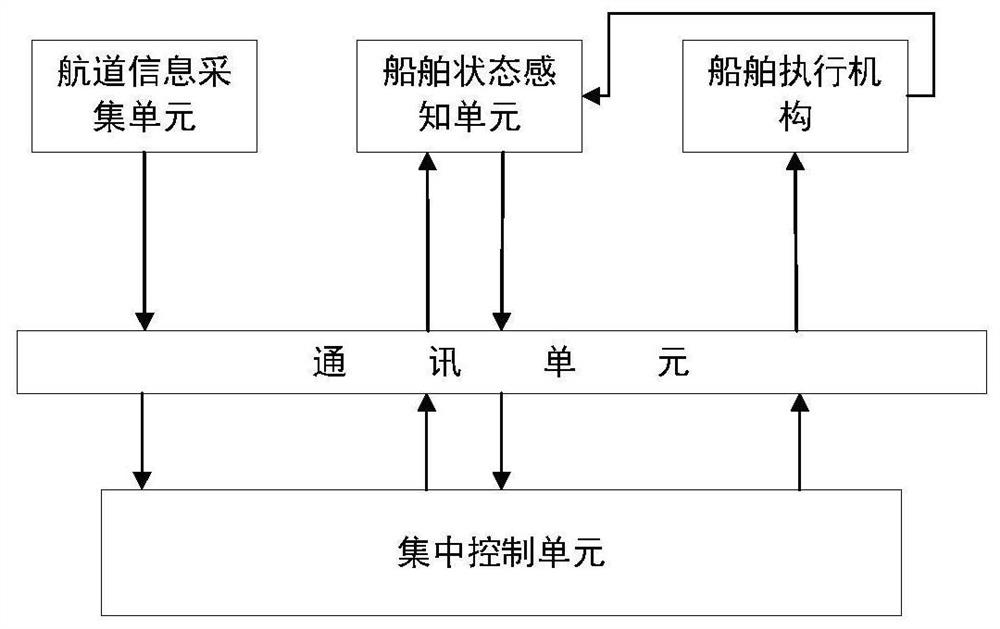
[0038] The present invention provides a method and system for actively coordinating ship formation paths considering maneuverability differences. The system includes a channel information collection unit, a ship state perception unit, a centralized control unit, and a communication unit. The relationship between each unit is as follows: figure 1 shown.
[0039] The channel information collection unit is used to collect channel information that affects ship path planning; the channel information includes channel width, trend, water depth and obstacle information; the channel information acquisition unit includes GPS, AIS, radar, electronic marine map and visual perception equipment; each ship is equipped with the above-mentioned channel information collection unit.
[0040] The ship state sensing unit is used to collect the state information of each s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com