Rope skipping posture and number recognition method based on computer vision
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of computer vision and recognition methods, applied in computer components, computing, neural learning methods, etc., can solve problems such as strong dependence on counters and limited artificial concentration
Active Publication Date: 2021-03-09
CHENGDU REMARK TECH CO LTD +1
View PDF14 Cites 6 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Eliminate the disadvantages of limited artificial concentration, strong reliance on skipping ropes for counters, and high requirements for audio frequency on the surrounding environment
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
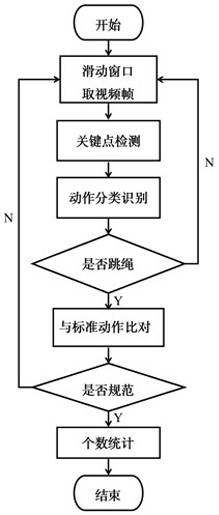
[0051] A computer vision-based rope skipping posture and number recognition method, such as image 3 , including the following steps, in order:
[0052] Step S1: collecting video of human jumping rope;
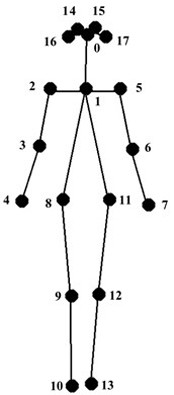
[0053] Step S2: Perform human key point detection on each frame of the video to obtain the coordinate positions and coordinate confidence of the 18 key points of the human body in each frame, and sequentially number them as 0, 1, ..., 17;
[0054] Step S3: Process the coordinate data of the key points, and normalize the coordinates of the key points to -0.5~0.5;
[0055] Step S4: Utilize the selected T-frame keyframes and the coordinates of the key points in each frame keyframe and the confidence of the coordinates to construct a skeleton sequence graph structure, record the space-time graph of the skeleton sequence as G=(V, E), and the nodes V={Vti|t=1,...,T; i=0,...,n-1}, the eigenvector F(vti)={xti,yti,scoreti of the i-th node of frame t }, (xti, yti) is the processed coo...
Embodiment 2
[0074] Feature vector in the step S9 The specific set of eigenvector included angles is: S A ={An(0)(1)-(1)(5), An(0)(1)-(1)(2), An(1)(2)-(1)(5), An(1) )(2)-(2)(3), An(2)(3)-(3)(4), An(1)(5)-(5)(6), An(5)(6)- (6)(7), An(1)(2)-(1)(8), An(1)(5)-(1)(11), An(1)(8)-(8)(9 ), An(8)(9)-(9)(10), An(1)(11)-(11)(12), An(11)(12)-(12)(13), An(2 )(8)-(2)(3), An(5)(11)-(5)(6)}, where 18 key points are numbered nose 0, neck 1, right shoulder 2, right elbow 3, right Wrist 4, Left Shoulder 5, Left Elbow 6, Left Wrist 7, Right Hip 8, Right Knee 9, Right Ankle 10, Left Hip 11, Left Knee 12, Left Ankle 13, Right Eye 14, Left Eye 15, Right Ear 16, Left ear 17.
[0075] Further, the method of calculating the cosine similarity in step S10 is to calculate the cosine of the angle between the eigenvectors, and calculate the variance or standard deviation between the cosine and the cosine of the angle between the cosine and the preset eigenvector, and the preset threshold is generally Take 0.68. ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a rope skipping posture and number recognition method based on computer vision. An ST-CGN model is used for training a skeleton sequence topological graph structure of each frame of image with extracted features; softmax is carried out on the features extracted by the ST-CGN, action classification and confidence are output, and rope skipping action counting is carried out if action classification output is rope skipping; and cosine similarity between the standard action feature vector and the current action feature vector is calculated, and when the cosine similarity isgreater than a preset threshold, it is judged that the current action is a standard action. According to the method, whether the rope skipping posture is correct or not can be judged by using the GCNand cosine similarityalgorithm, and the rope skipping number can be calculated by using a maximum value or minimum value method.
Description
technical field [0001] The invention relates to the field of human motion analysis, in particular to a computer vision-based recognition method for jumping rope gestures and numbers. Background technique [0002] Rope skipping can achieve aerobic and anaerobic exercise effects at the same time, exercise multiple muscles, exercise coordination and balance, and enhance cardiopulmonary function. Long-term pattern skipping training can effectively improve the bone density of teenagers, and significantly enhance physical fitness such as strength and explosive power. The recognition of the skipping posture refers to the recognition of the skipping posture and comparison with the standard posture to correct the wrong skipping posture. Counting the number of rope skipping refers to counting the number of different rope skipping methods. [0003] The method adopted in the prior art is to use the human body key point recognition algorithm to identify the key points of the human body...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.




 Login to View More
Login to View More  Login to View More
Login to View More