

Interactive kinematics modeling method of common industrial robot
A technology of robot kinematics and industrial robots, applied in the fields of robot technology and computer graphics, which can solve the problems of robot modeling and simulation inconvenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with drawings and embodiments.
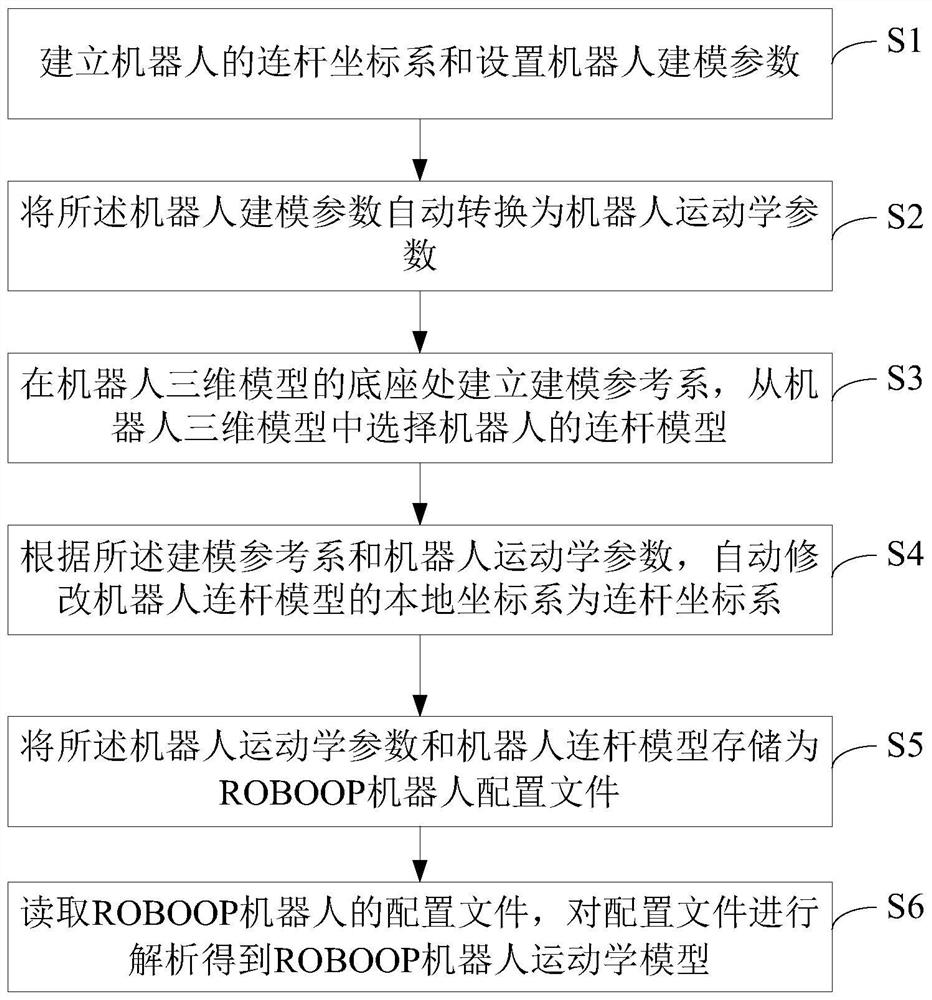
[0049] see figure 1 , an interactive kinematics modeling method for common industrial robots, including:
[0050] S1, establish the link coordinate system of the robot and set the robot modeling parameters; specifically, in step S1, use the D-H modeling method to establish the link coordinate system of the robot, and the modeling parameters include the link parameters and joint angles of the robot Initial value, initial value of joint angle limit and initial value of joint axis rotation. The connecting rod parameters of the robot are the key length dimensions of the robot body, and the joint axis rotation is represented by 1 or -1. The former means that the joint rotation defined by the link coordinate system is the same as that of the robot body, and the latter indicates that it is different.
[0051] S2, automatically converting the robot modeling parameters into ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More