

Interactive kinematics modeling method for universal series robot
A modeling method and robot technology, applied in the research field of robotics and computer graphics, can solve the problems of inconvenient and cumbersome robot simulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
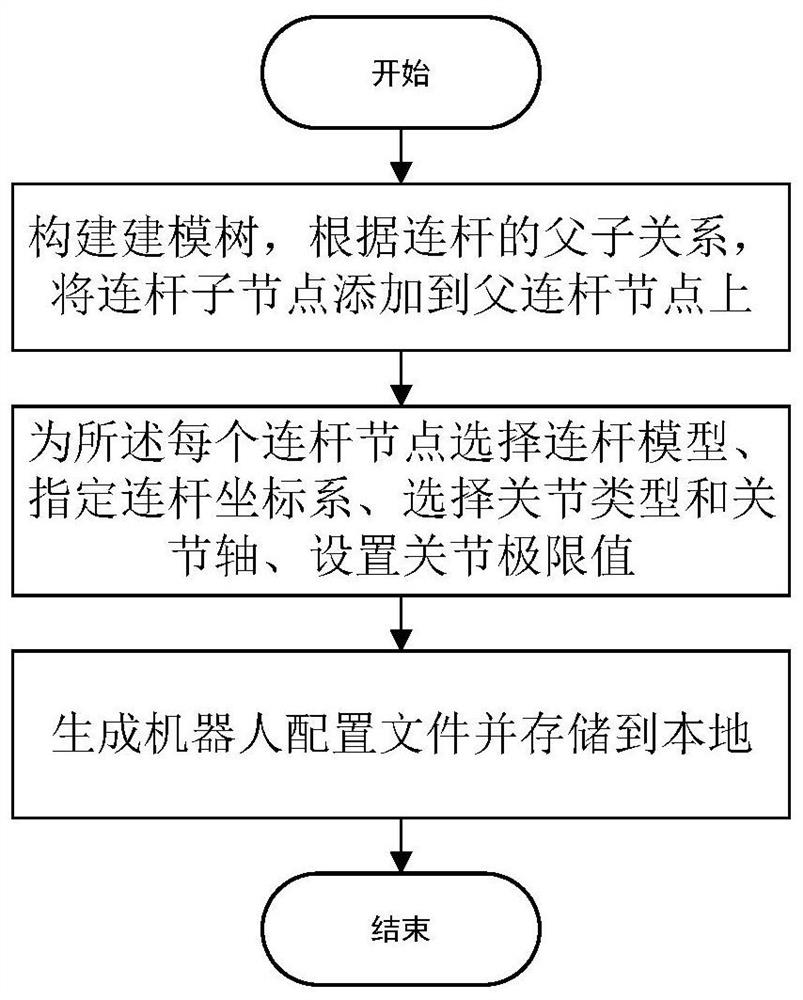
[0027] An interactive kinematics modeling approach for a general-purpose tandem robot, such as figure 1 shown, including the following steps:
[0028] S1, build a modeling tree, add the child node of the link to the parent node of the link according to the parent-child relationship of the link;
[0029] S2, selecting a link model for each link node, specifying a link coordinate system, selecting a joint type and a joint axis, and setting joint limit values;
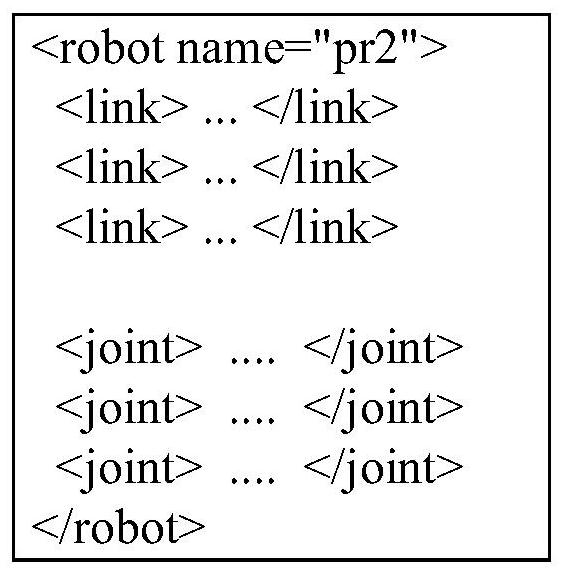
[0030] S3, generate robot configuration files and store them locally.
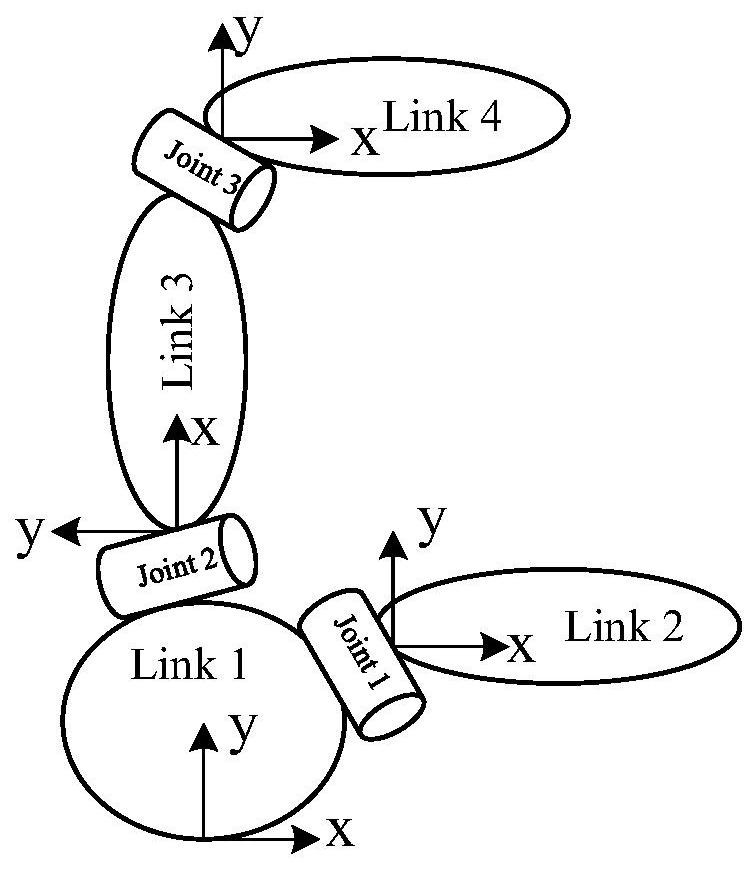
[0031] Specifically, in the step S1, the modeling tree is a data structure describing the robot, and the data structure defines attributes such as modeling interfaces, connecting rods, joints, joint types, and joint limits, and corresponding methods. The parent-child relationship refers to the connection relationship between the links of the robot, and the previous link of the robot is the parent link of the next link. Such as figure 2 As shown, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More