

Point cloud geometrical information inter-frame encoding and decoding method
A technology of geometric information and inter-frame coding, which is applied in the field of codec, can solve the problems that the correlation in the time domain cannot remove redundant information, and there is no inter-frame technology.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
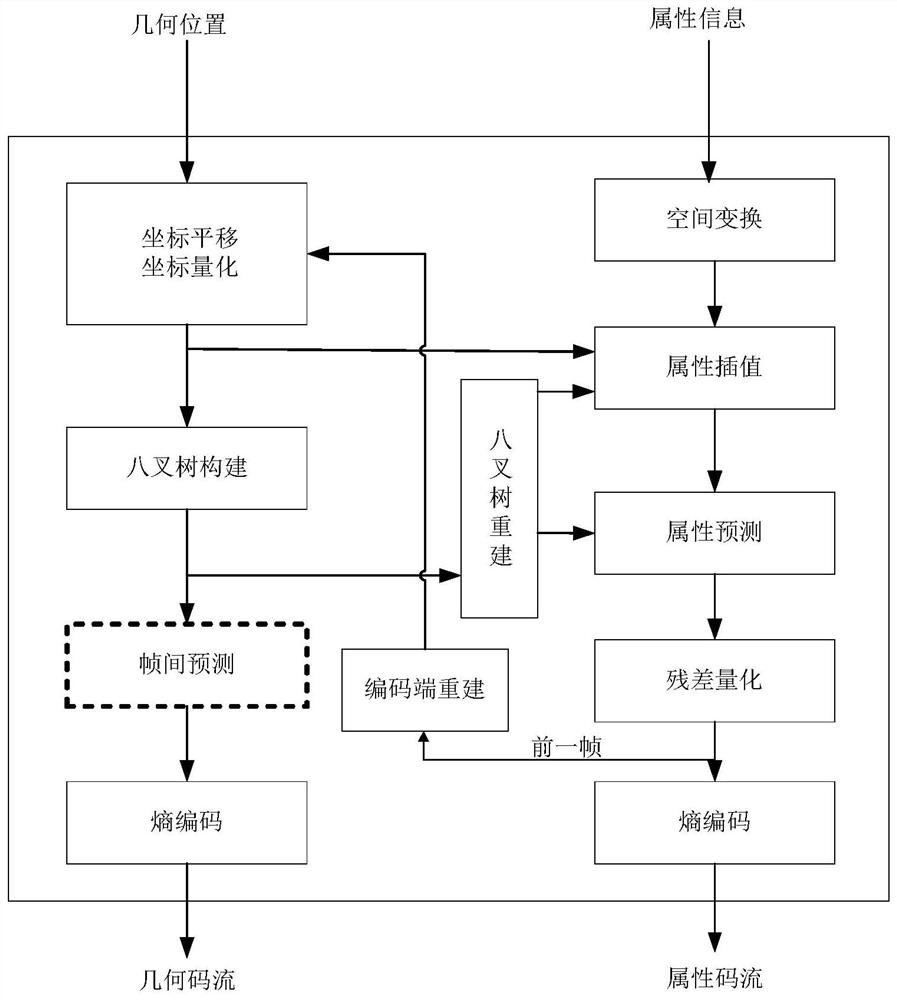
[0064] refer to image 3 , in the AVS encoding process, the inter-frame technology, so that an inter-frame encoding method with point cloud geometric information provided by the embodiment of the present invention can inter-frame predict the point cloud of the current frame before performing entropy encoding, and then perform entropy encoding.
[0065] like Figure 4 As shown, a method for inter-frame coding of point cloud geometric information provided by an embodiment of the present invention includes:
[0066] S1a, obtaining the frame point cloud before the current frame point cloud as the reference frame point cloud of the current frame point cloud;
[0067] Wherein, the point cloud of the frame before the point cloud of the current frame may be the point cloud of the previous frame of the point cloud of the current frame, or a frame of the point cloud of the previous N frames, and the present invention does not limit it here.
[0068] S2a, performing voxelization proces...
Embodiment 2
[0086] As an optional embodiment of the present invention, for each node to be coded in the first octree structure, when the occupancy of the reference node corresponding to the node to be coded is occupied, the acquisition and reference node The steps of the occupancy situation of the adjacent first neighbor node include:
[0087] For each node to be encoded in the first octree structure, when the occupancy of the reference node corresponding to the node to be encoded is occupied, the occupancy of the first neighbor node coplanar with the reference node is acquired.
Embodiment 3
[0089] As an optional embodiment of the present invention, for each node to be encoded in the first octree structure, when the occupancy of the reference node corresponding to the node to be encoded is occupied, the acquisition and reference Before the step of the first neighbor node adjacent to the node, the point cloud geometric information interframe coding method also includes:
[0090] Step a: For each node to be encoded in the first octree structure, determine whether the reference node corresponding to the node to be encoded is occupied, if not, then obtain the coplanar, collinear, copoint and The occupancy of any or combined second neighbor nodes in the co-plane of the parent node of the coding node;
[0091] Step b: Determine the context model of the occupancy code of the node to be encoded based on the occupancy situation of the second neighbor node.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More