Relative pose calibration method and related device
A technology of relative pose and calibration method, which is applied in image data processing, instrumentation, calculation, etc., and can solve problems such as easy failure and heavy workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The terms "first", "second", and "third" in the description, embodiments and claims of the present application and the above drawings are used to distinguish similar objects, but not necessarily to describe a specific order or priority. Furthermore, the terms "comprising" and "having", as well as any variations thereof, are intended to cover a non-exclusive inclusion, for example, of a sequence of steps or elements. A method, system, product or device is not necessarily limited to those steps or elements explicitly listed, but may include other steps or elements not explicitly listed or inherent to the process, method, product or device. "And / or" is used to select one or both of the two objects it connects. For example "A and / or B" means A, B or A+B.
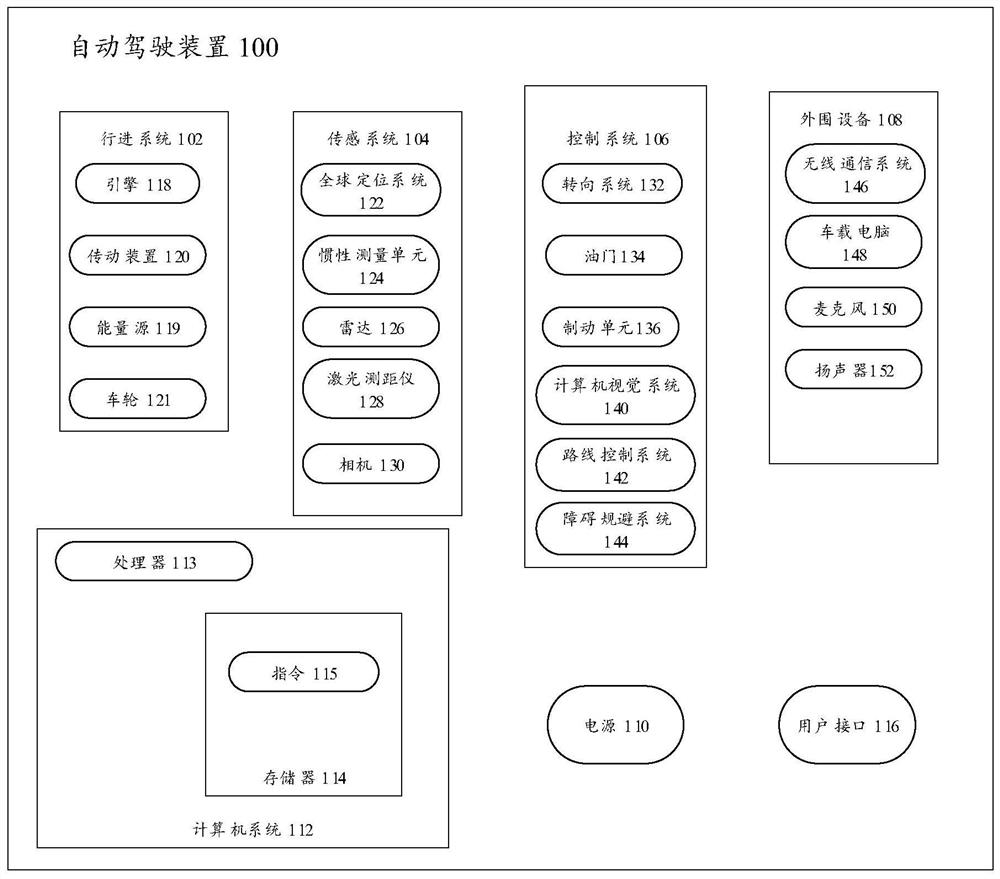
[0055] As mentioned in the background art, the relative poses of the cameras on the self-driving car will change with the increase of usage time. At this time, the calibration parameters of each camera (ie, the external...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap