

Propeller cleaning path planning method and cleaning robot using the same
A cleaning robot and path planning technology, applied in manipulators, ship cleaning devices, program-controlled manipulators, etc., can solve the problems of lack of effective control, consumption, and long cleaning time, reducing the amount of calculation, improving cleaning efficiency, and applicability. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further clarified below in conjunction with the accompanying drawings and specific embodiments. It should be understood that these embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
[0033] A propeller cleaning path planning method, the cleaning path planning method is used for cleaning the propeller, such as Figure 5 shown, including the following steps:
[0034] Step 1: Establish a coordinate system;
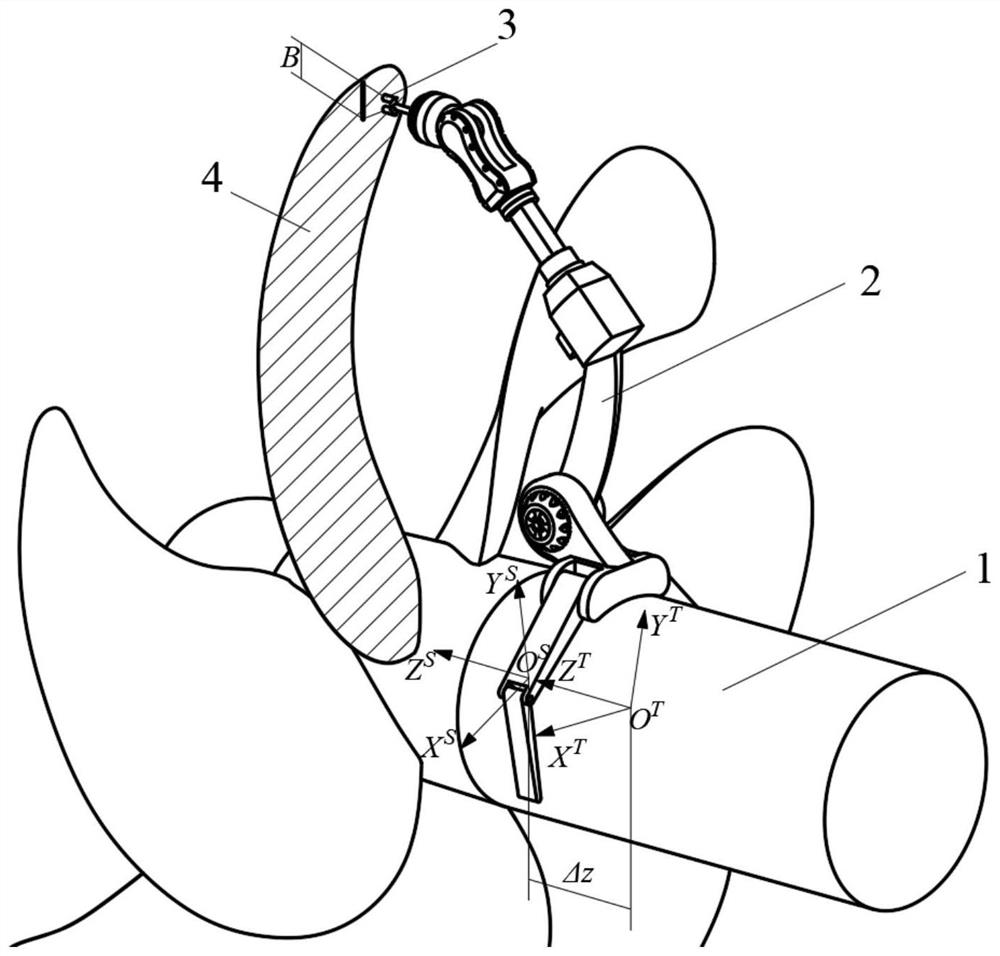
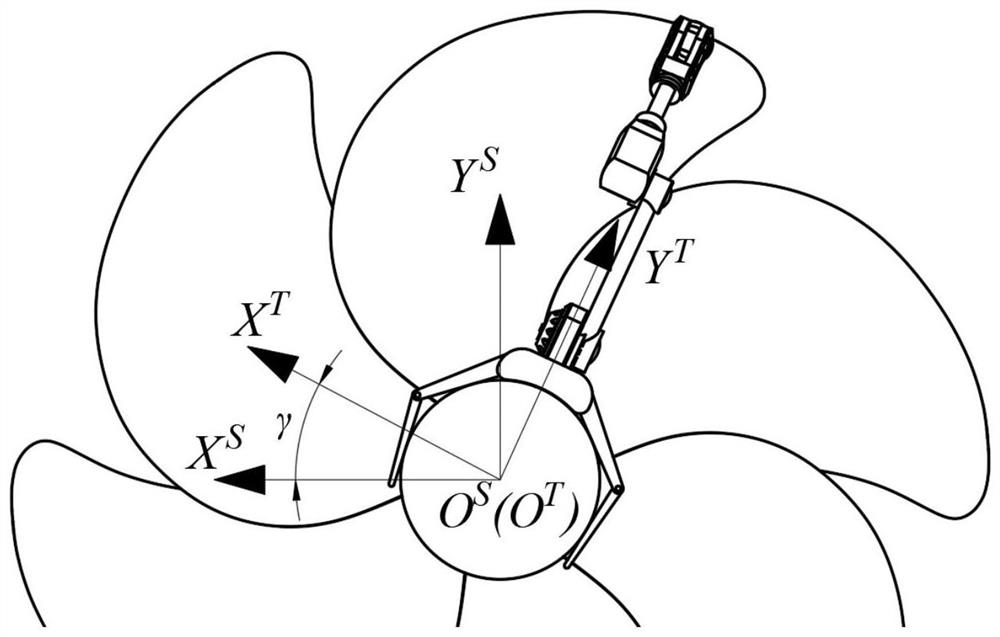
[0035] like figure 1 , 2 As shown, the machining coordinate system of the propeller 1 is used as the fixed coordinate system {S}=(O S ,X S ,Y S ,Z S ),Z S The direction coincides with the axis line of the propeller shaft, and the clamping center line of the cleaning robot 2 is Z T direction, establish the coordinate system of cleaning robot 2 as {T}=(O T ,X T ,Y T ,Z T ), the cleaning robot 2 is clamped and fixed on the propeller shaft of the propeller 1, Z S wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More