Vehicle override control method and system based on override mode
A technology that transcends control and vehicles, applied in the field of vehicle control, can solve problems such as rear-end collisions and rollovers, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] Embodiment 1: see attached figure 1 As shown, a vehicle overriding control method based on an overriding mode includes the following steps:
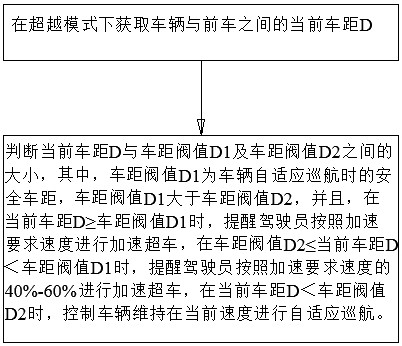
[0032] Step 1: Obtain the current distance D between the vehicle and the vehicle in front in the overtaking mode;
[0033] Step 2: Determine the size between the current vehicle distance D and the vehicle distance threshold D1 and vehicle distance threshold D2, where the vehicle distance threshold D1 is the safe distance between vehicles during adaptive cruise, and the vehicle distance threshold D1 is greater than the vehicle distance The distance threshold D2, the vehicle distance threshold D2 is preferably 1 / 3~5 / 6 of the vehicle distance threshold D1, when the current vehicle distance D ≥ the vehicle distance threshold D1, the driver is reminded to accelerate and overtake according to the acceleration required speed, When the vehicle distance threshold D2≤the current vehicle distance D
Embodiment 2
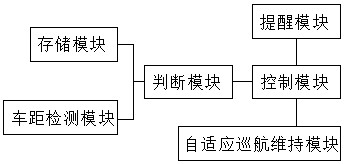
[0036] Embodiment 2: A vehicle overtaking control system based on an overtaking mode, including a storage module, a vehicle distance detection module, a judgment module, a control module, a reminder module, and an adaptive cruise maintenance module;
[0037] The storage module is used to store the vehicle distance threshold D1 and the vehicle distance threshold D2, wherein the vehicle distance threshold D1 is a safe vehicle distance when the vehicle is adaptively cruising, and the vehicle distance threshold D1 is greater than the vehicle distance threshold D2, Moreover, the vehicle distance threshold D2 is 1 / 3~5 / 6 of the vehicle distance threshold D1;
[0038] The vehicle distance detection module is used to obtain the current vehicle distance D between the vehicle and the vehicle in front in the overtaking mode;
[0039] The judging module is communicatively connected with the vehicle distance detection module and the storage module, and is used to judge the size between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com