A humanoid wrist-type robot claw and its grasping method
A robot claw and wrist-type technology, applied in the field of robotics, can solve the problems of time-consuming, energy-consuming, asynchronous shedding, etc., and achieve the effects of reduced cost, good synchronization, and large envelope radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with accompanying drawing.
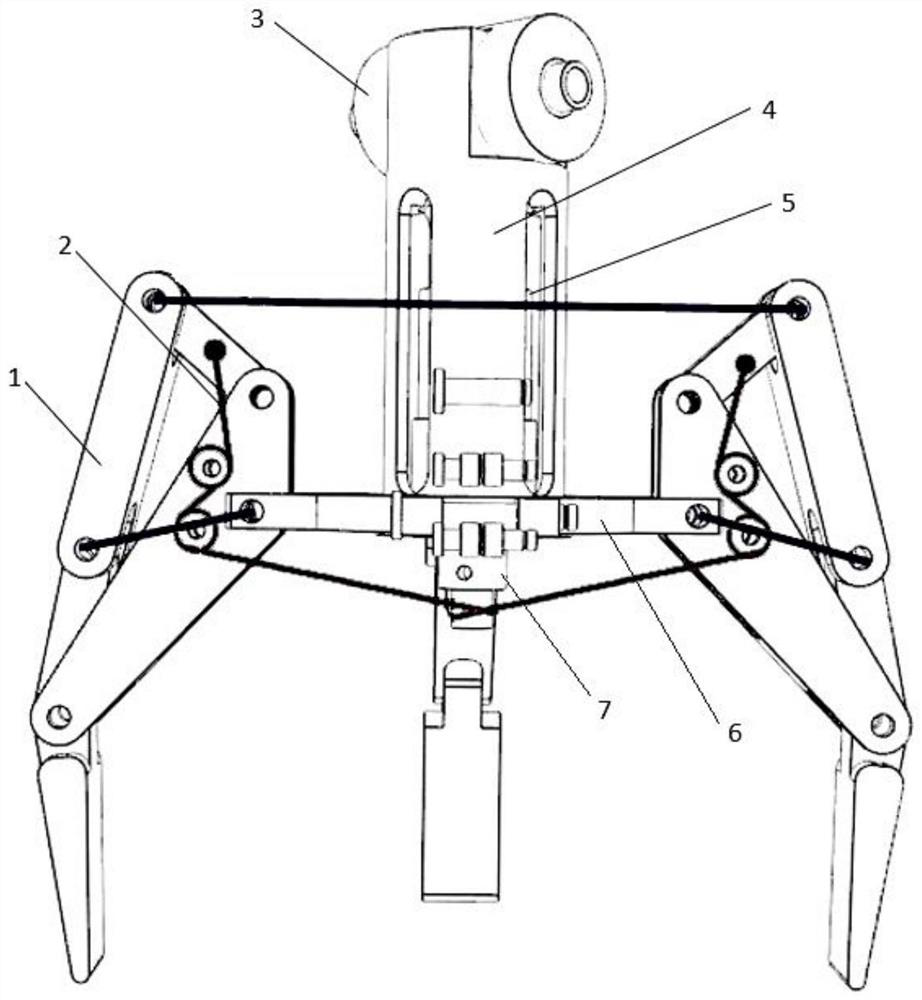
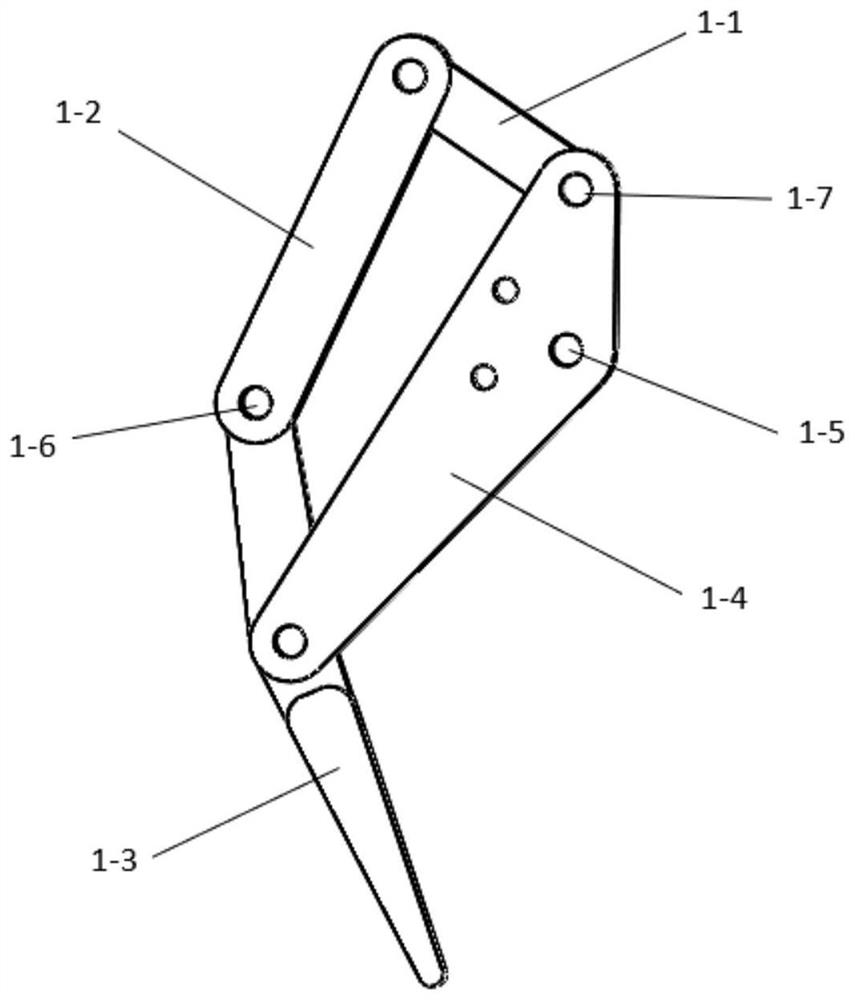
[0020] like figure 1 , 2 , 3, 4 and 5, a humanoid wrist-type robot claw, including claw piece 1, steel wire rope 2, connecting block 3, motor sleeve 4, motor 5, claw disc 6 and rope winding shaft 7; motor sleeve 4 The connecting block 3 is fixed on the top, and the claw plate 6 is fixed on the bottom; the housing of the motor 5 is fixed in the motor sleeve 4, and the output shaft of the motor 5 is connected with the rope winding shaft 7 through a coupling; the rope winding shaft 7 passes through The center hole of the claw plate 6. like figure 2 Shown, claw piece 1 comprises bar one 1-1, bar two 1-2, bar three 1-3, bar four 1-4, torsion spring one 1-6, torsion spring two and pin 1-7; The two ends of -1 are respectively hinged with one end of bar two 1-2 and bar four 1-4 by pin 1-7, and the other end of bar two 1-2 and bar four 1-4 is respectively connected with an end ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap