

Multi-agent formation planning method based on local visual field
A multi-agent, intelligent body technology, applied in two-dimensional position/channel control, non-electric variable control, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0119] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention, and the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
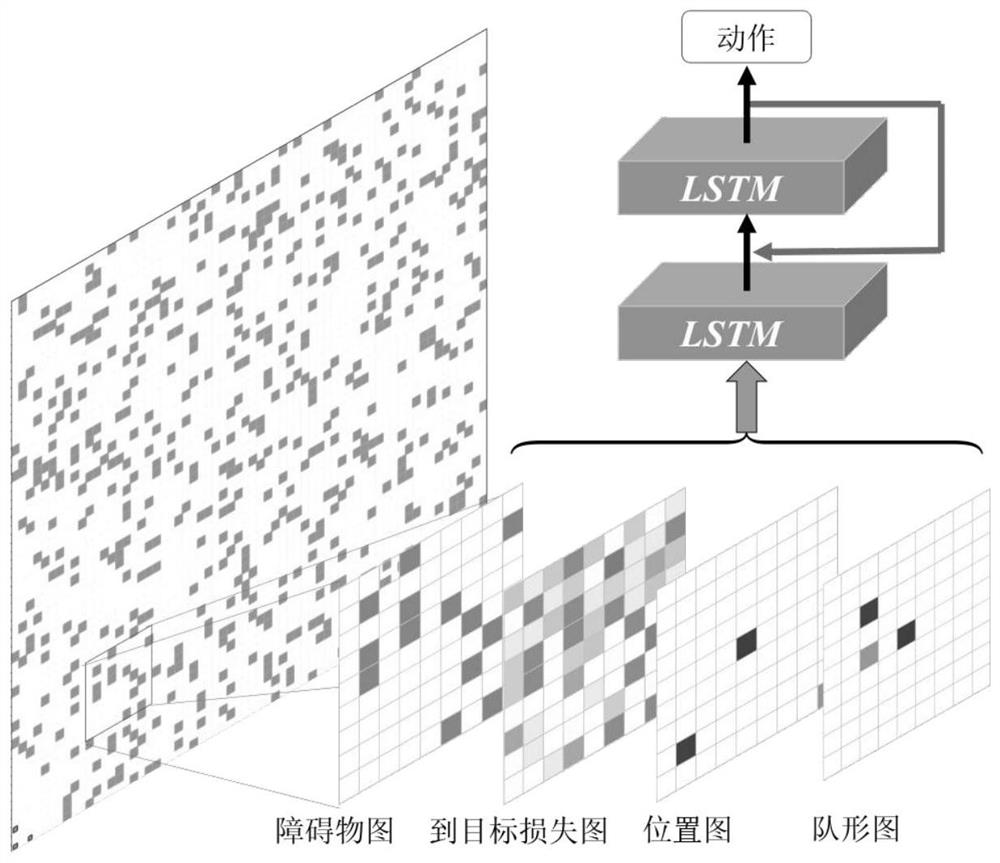
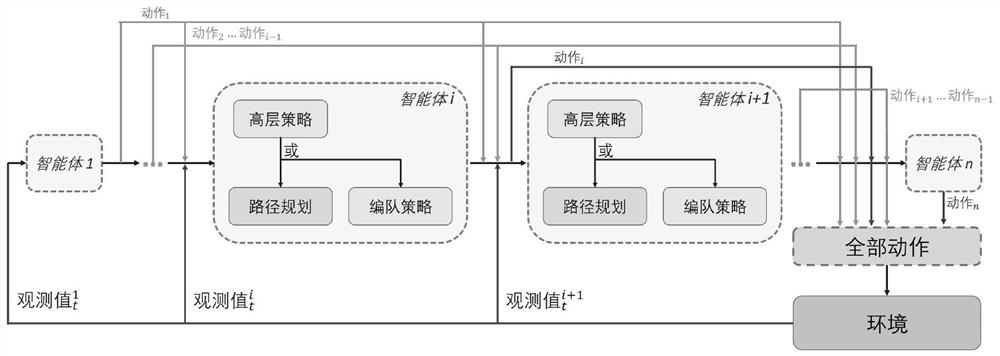
[0120] The present invention adopts a set of layered reinforcement learning structure to separate the influence of each sub-task on each other during training. Specifically, we split the overall task into two sub-strategies and a high-level strategy. The two sub-strategies are the path planning strategy and the formation maintenance strategy. The path planning strategy is only responsible for planning the collision-free trajectory from the multi-agent to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More