

Target object grasping method, device, storage medium and electronic device
A technology of target objects and target coordinates, which is applied in the fields of storage media and electronic equipment, target object grasping methods and devices, can solve the problems of low accuracy of grasping position selection, and achieves improved selection accuracy and improved grasping stability. , the effect of reducing the risk of damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0158] 1. A method for grasping a target object, comprising:
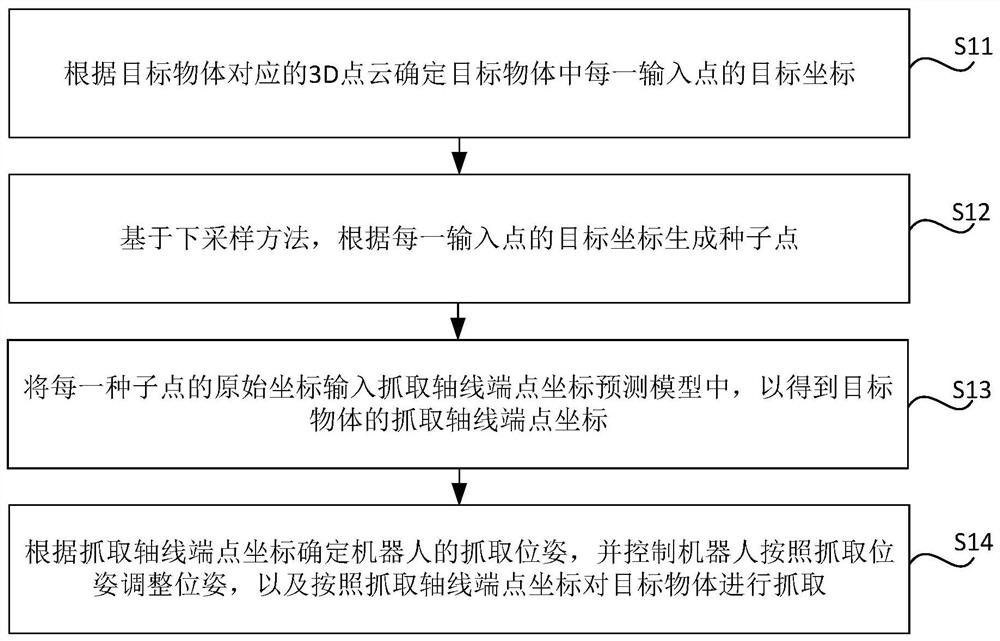
[0159] Determine the target coordinates of each input point in the target object according to the 3D point cloud corresponding to the target object;
[0160] Based on the downsampling method, a seed point is generated according to the target coordinates of each input point;
[0161] The original coordinates of each of the seed points are input into the grasping axis endpoint prediction model to obtain the grasping axis endpoint coordinates of the target object;
[0162] The grasping posture of the robot is determined according to the coordinates of the end points of the grasping axis, and the robot is controlled to adjust the posture according to the grasping posture and grasp the target object according to the coordinates of the end points of the grasping axis.
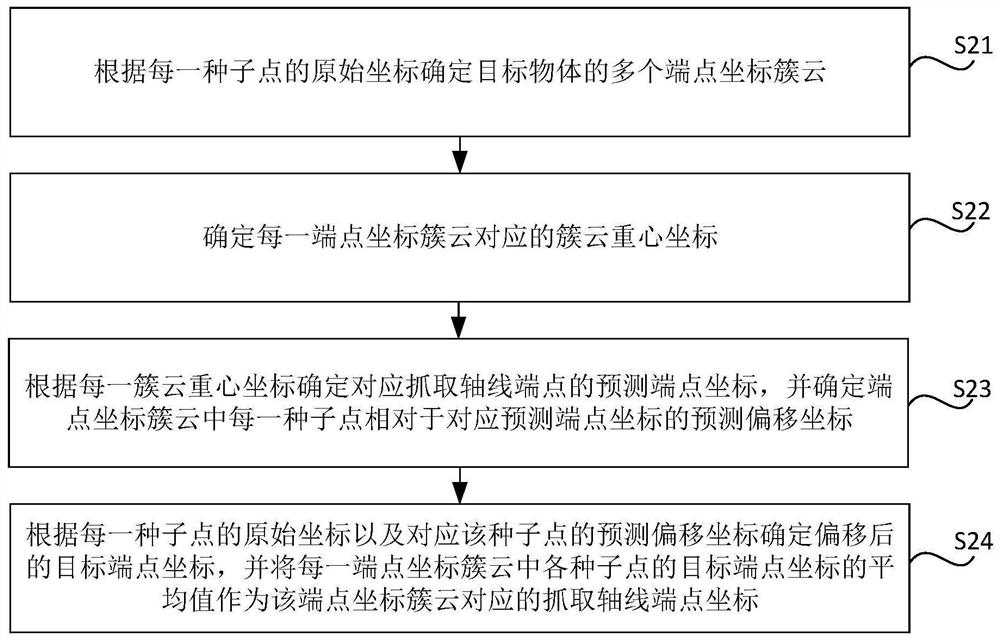
[0163] 2. According to the method of Embodiment 1, the grasping axis endpoint prediction model generates the grasping axis endpoint coordinates of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More