

Method for robot to collect position information, terminal and storage medium
A technology of location information and robots, applied in the field of robots, can solve the problems of maintaining the accuracy of location information, achieve the effect of maintaining accuracy, maintaining accuracy, and reducing data collection costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
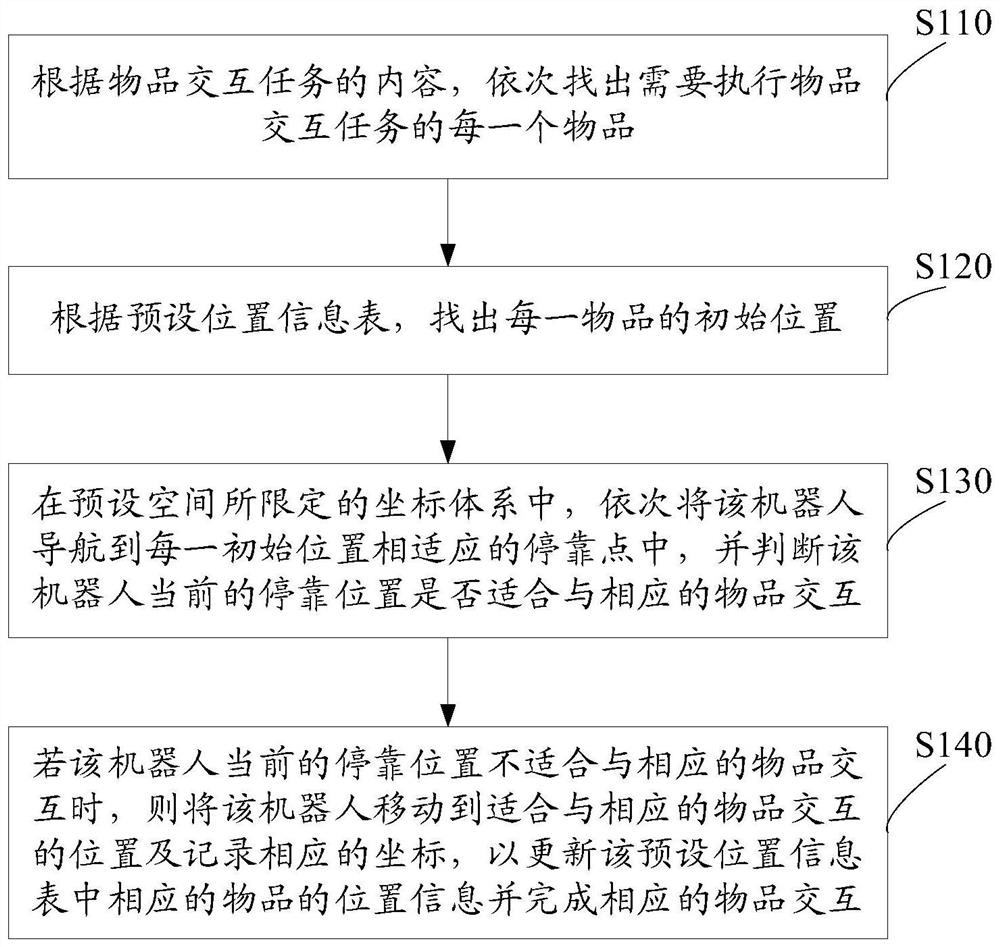
[0023] Such as figure 1 As shown, Embodiment 1 of the present invention provides a method for a robot to collect position information, the robot is located in a preset space, and the method includes the following steps:
[0024] Step S110: According to the content of the item interaction task, each item that needs to perform the item interaction task is sequentially found.
[0025] Specifically, in the logistics and sorting industry, the above-mentioned preset space specifically refers to an item storage warehouse. There are several shelves regularly distributed in the item storage warehouse, and several item storage slots are regularly distributed on each shelf to store corresponding items. . The robot collects the item location information in the item storage warehouse mainly based on the item interaction task issued by the user. Therefore, before performing this step of "according to the content of the item interaction task, sequentially find out each item that needs to p...
Embodiment 2
[0043] Such as Figure 5 As shown, Embodiment 2 of the present invention proposes a terminal 20, the terminal 20 includes a memory 21, a processor 22, a program stored in the memory and operable on the processor, and a program for implementing the processor 21 and the memory 22 The data bus 23 for connection and communication between them, when the program is executed by the processor, realizes the steps of the method for collecting position information by the robot in the first embodiment above, as described above specifically, and will not be repeated here.
[0044] It should be noted that the embodiment of the terminal 20 in the embodiment of the present invention belongs to the same idea as the method embodiment 1 or the method embodiment 2, and its specific implementation process is detailed in the method embodiment 1, and the technical features in the method embodiment 1 are in the terminal 20 embodiments are correspondingly applicable, and will not be repeated here.
Embodiment 3
[0046] Embodiment 3 of the present invention proposes a storage medium for computer-readable storage. The storage medium stores one or more programs, and the one or more programs can be executed by one or more processors to implement the above-mentioned embodiments. The invention discloses specific steps of a method for collecting position information by a robot.
[0047] It should be noted that the above-mentioned storage medium and the method embodiment 1 belong to the same concept, and the specific implementation process is detailed in the method embodiment 1, and the technical features in the method embodiment 1 are correspondingly applicable in the storage medium embodiment, and are not repeated here. repeat.
[0048] The method, terminal, and storage medium for the robot to collect location information in the embodiment of the present invention, the robot is located in the preset space, and when it performs an item interaction task, it will sequentially find out the item...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More