Automatic driving vehicle trajectory planning method and system
A vehicle trajectory and automatic driving technology, applied in the field of vehicle trajectory planning, can solve problems such as unsuitable low-speed planning, vehicle instability, traffic accidents, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
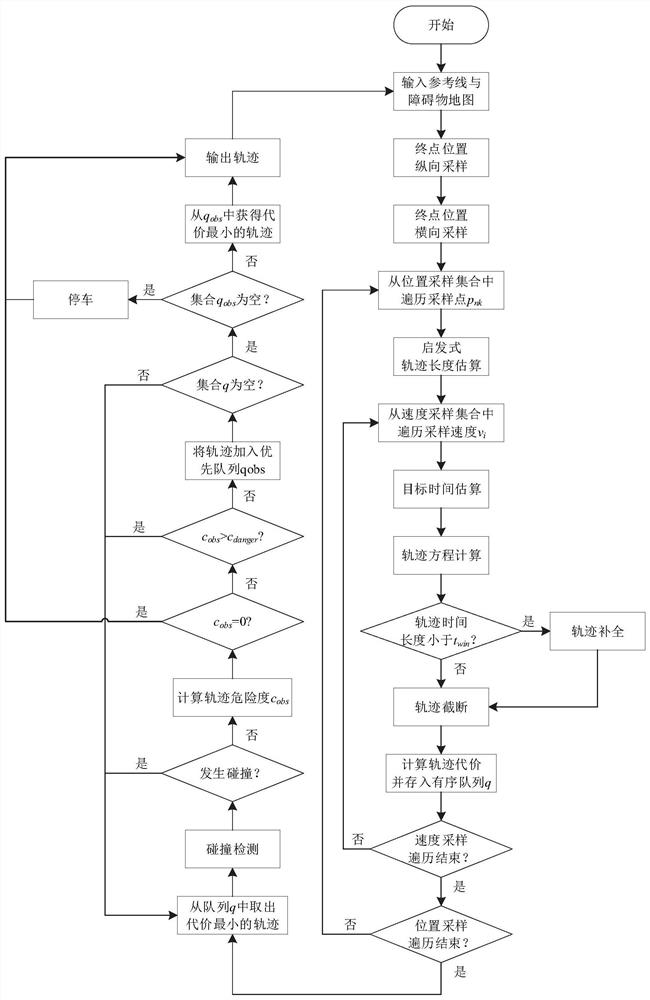
[0058] like figure 1 As shown, the present embodiment provides a method for trajectory planning of an automatic driving vehicle, which specifically includes the following steps:
[0059] Obtain vehicle driving reference lines and obstacle maps;
[0060] Perform vertical sampling and horizontal sampling on the end position to obtain a position sampling set and a speed sampling set;
[0061] Traverse the sampling points from the position sampling set, heuristically estimate the trajectory length; traverse the sampling speed from the speed sampling set, estimate the target time, and calculate the trajectory equation;
[0062] The integrity of the trajectory is judged according to the length of the trajectory, and the trajectory cost of the complete trajectory is calculated and stored in the ordered queue q. After the speed sampling traversal is completed, the trajectory with the smallest cost is sequentially taken from the ordered queue q and the collision detection is performed...
Embodiment 2
[0156] The present embodiment provides a system for trajectory planning of an automatic driving vehicle, which specifically includes the following modules:
[0157] A reference line and map acquisition module, which is used to acquire vehicle driving reference lines and obstacle maps;
[0158] A sampling module, which is used to perform longitudinal sampling and lateral sampling to the end position, to obtain a position sampling set and a speed sampling set;
[0159] The trajectory equation calculation module is used to traverse the sampling points from the position sampling set, heuristically estimate the trajectory length; traverse the sampling speed from the velocity sampling set, estimate the target time, and calculate the trajectory equation;
[0160] Trajectory cost calculation module, which is used to judge the integrity of the trajectory according to the length of the trajectory, calculate the trajectory cost of the complete trajectory and store it in the ordered queue...
Embodiment 3
[0164] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the steps in the method for trajectory planning of an automatic driving vehicle as described in the first embodiment above are realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com