

Unmanned vehicle dynamic path planning method based on free space and fast search random tree algorithm
A free space, dynamic path technology, used in surveying and navigation, road network navigators, measuring devices, etc., can solve the problem of inapplicability, complex free space logic, artificial potential field method and particle swarm algorithm easy to fall into the local optimal solution And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] 5.1 Building the map as simply connected polygons
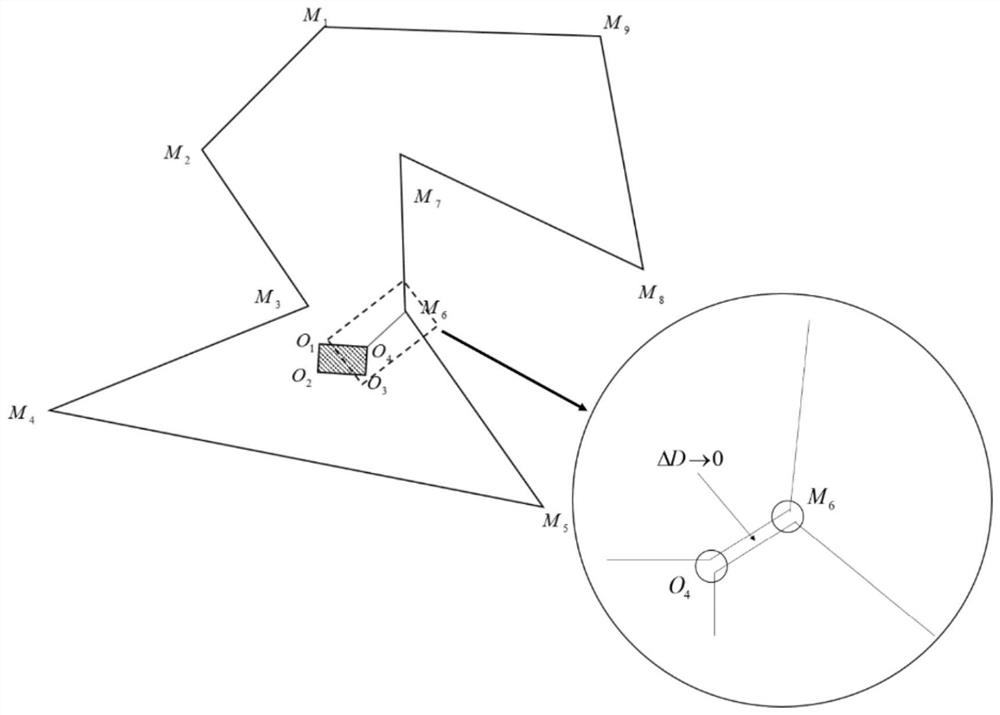
[0022] The basic idea of the free space method is to divide the map into several free spaces composed of convex polygons. This paper uses a concave polygon convex decomposition algorithm. Therefore, the map with obstacles should be converted into a polygon first. The basic idea and steps are as follows .
[0023] Such as figure 1 As shown, when the map M 1 m 2 …M n There is an obstacle O in 1 o 2 …O n , choose a point O of the obstacle i A certain vertex M on the boundary of the map i connection, denoted as O i m i . Its vector can have two directions and Assuming two vectors and There is a distance ΔD→0 between them, and the vertex O of the obstacle i Vertex M of the map with i Connected by two vectors, the map becomes a simply connected domain map M 1 m 2 …M i o i o i+1 …O n o 1 …O i m i …M n . If there are multiple polygonal obstacles in the map, each obstacle needs to be directly o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More