

Difference Compensation Mechanism Applied to Manipulator
A technology of compensation mechanism and manipulator, which is applied in the field of medical equipment, can solve the problems that cannot be applied in the medical field, and achieve the effect of flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
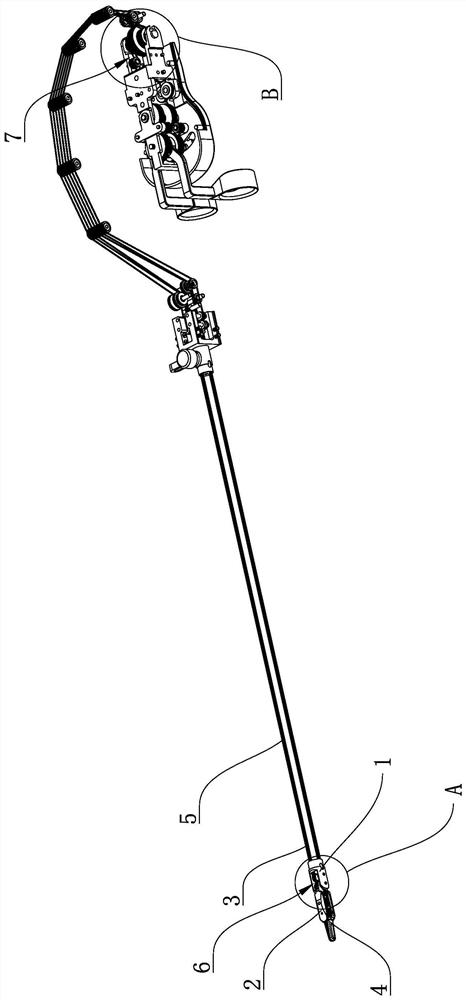
[0030] The forceps assembly 4 can be rotated under the pulling control of the second control rope 5. But the forceps are often not only
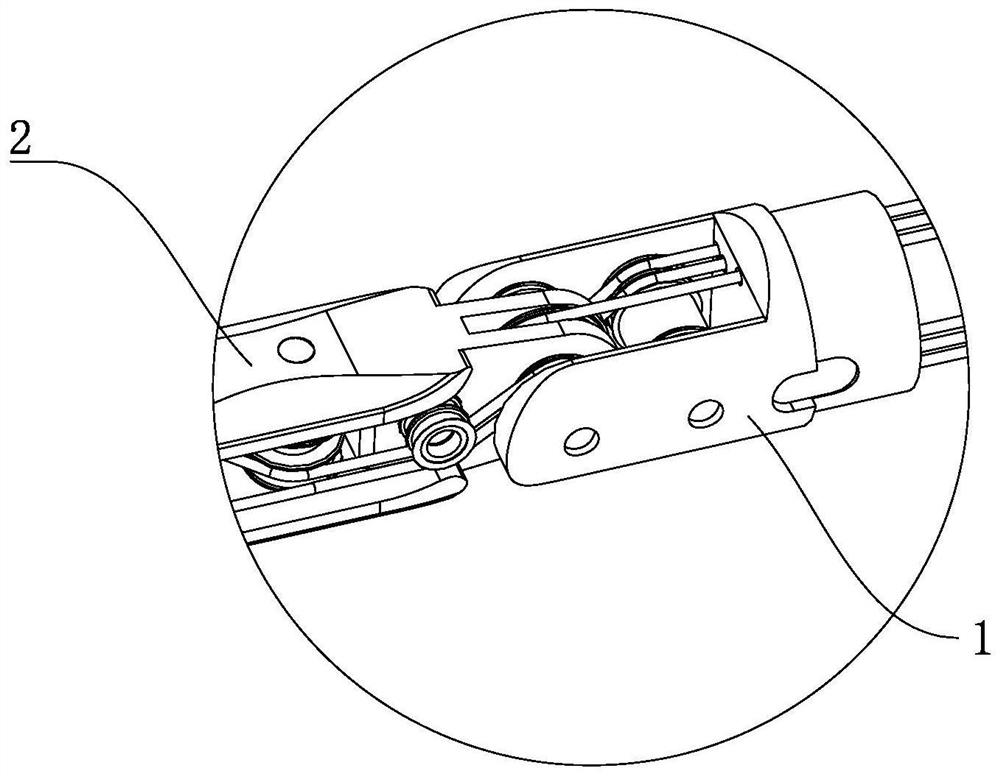
[0037] The first control rope 3 and the rotating assembly 2, the second control rope 5 and the forceps head assembly 4 can be connected to each other
[0041] Preferably, an anti-interference step 45 extends from the outer edge of the second rotating wheel 43 and / or the third rotating wheel 44. This
[0043] Preferably, the axis of the second tensioning wheel 62 coincides with the axis of rotation of the rotating assembly 2. i.e. the second tension
[0047] The specific embodiments described herein are merely illustrative of the spirit of the invention. The technical field to which the present invention belongs
[0048] Although the forceps head seat 1, the rotating assembly 2, the first control rope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More