

Unmanned aerial vehicle remote sensing networking redundancy fault-tolerant control method
A technology of redundant fault-tolerant and control methods, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as reliability decline, improve stability, reduce costs, and reduce the possibility of fewer and heavy flights Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0044] In order to make the technical problems, technical solutions and beneficial effects to be solved by the embodiments of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
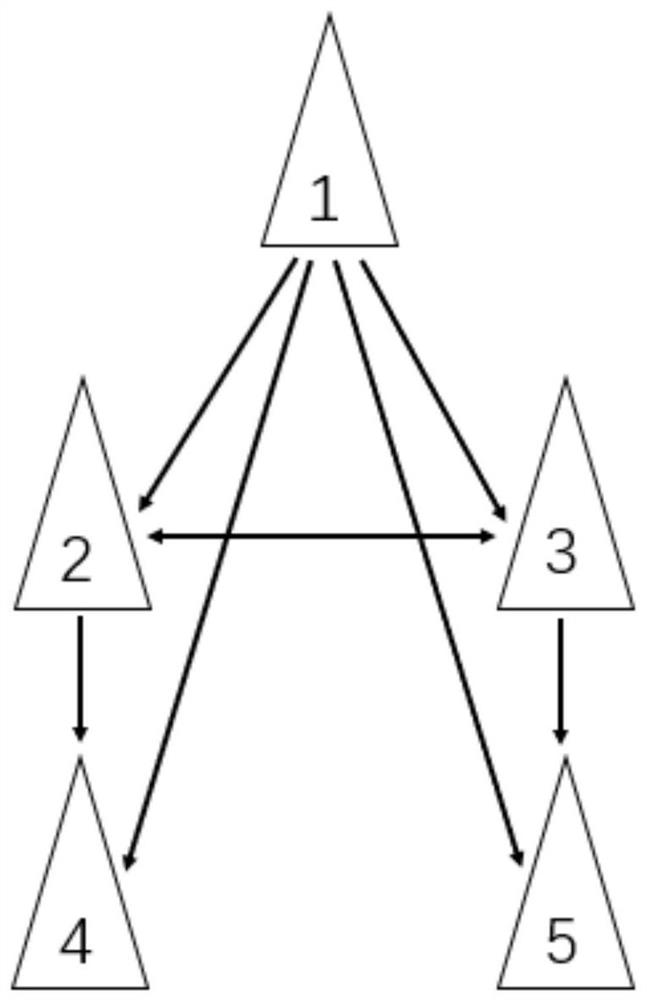
[0045] Please refer to the attached figure 1 , the present invention's leading-following 5 unmanned aerial vehicle networking remote sensing modes are described:
[0046] figure 1 Triangles are used to represent five drones, and the numbers represent the serial numbers of the unmanned vehicles, which are 1 to 5 respectively. No. 1 is the pilot drone, and No. 2 and No. 3 are the first echelon following the drone. UAVs ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More