

A UAV interception method against low, small and slow targets
A UAV and target technology, applied in instruments, three-dimensional position/channel control, control/regulation systems, etc., can solve problems such as excessive terminal demand overload, large tracking error, and difficulty in accurately intercepting, and achieve interception trajectory length. The effect of short, short interception time and fast interception speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
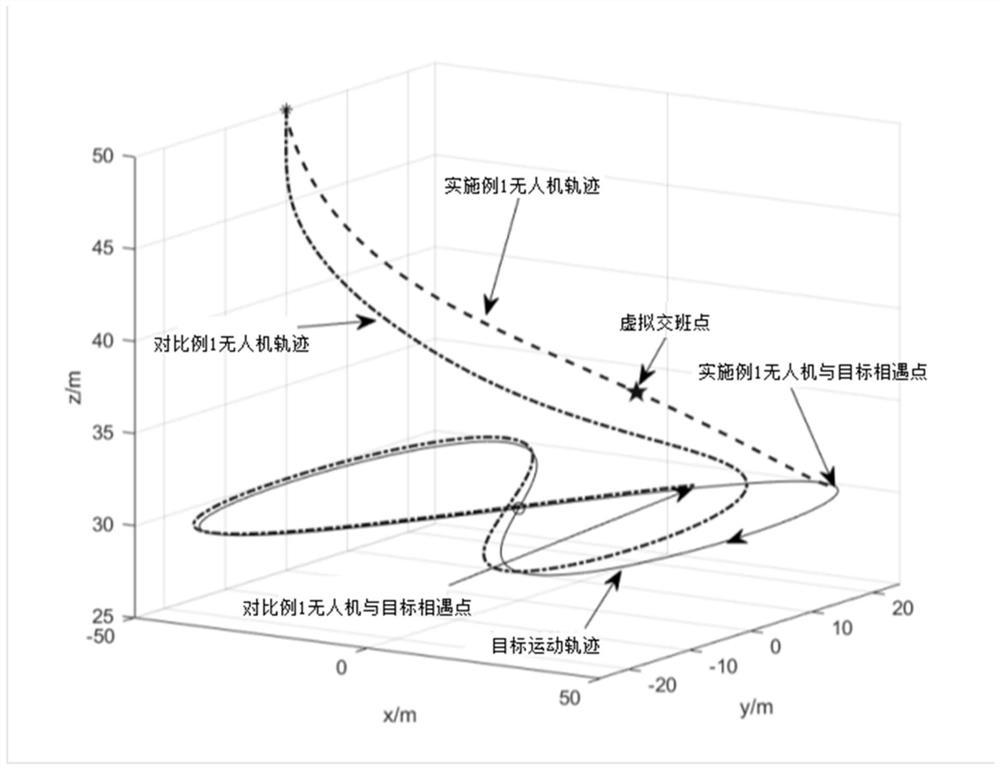
[0084] Carry out a simulation experiment, set the coordinates of the drone's take-off point (-50,0,50), the coordinates of the virtual shift point (0,20,35), and the initial coordinates of the target point (0,0,30). The initial speed of the UAV is 0m / s, and the target makes a clockwise "8" movement at 10m / s.
[0085] The UAV identifies the target through the photoelectric pod and its control module, and calculates the overload command through the following formula (1):
[0086]
[0087] Among them, V r , It is obtained by real-time calculation of the photoelectric pod and its control module, and the scale factor N 1 , N 2 It can be obtained by the following formula (2):
[0088]
[0089] The zero-controlled off-target amount Z 2 It can be obtained by the following formula (3):
[0090]
[0091] In the present invention, t go,1 , t go,2 Obtained by the following formula (4):
[0092]
[0093] Where N=3, R represents the relative distance between the UAV an...
experiment example 1
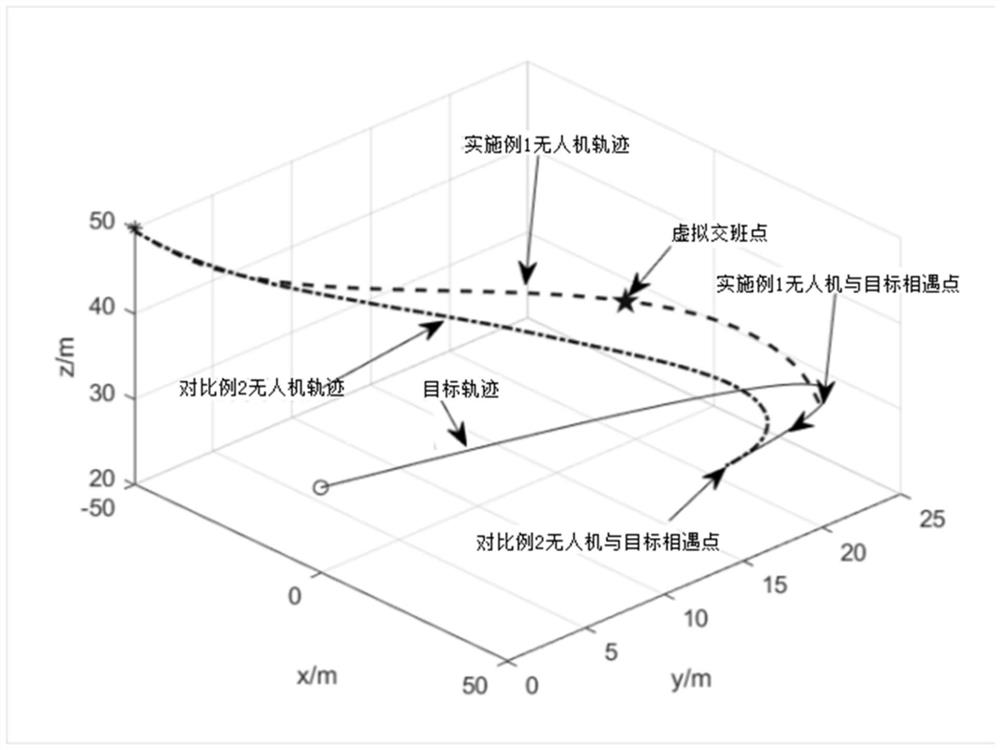
[0104] Comparing the running track of the unmanned aerial vehicle in Example 1 and Comparative Example 1, Embodiment 1 and Comparative Example 2, the result is as follows figure 2 , image 3 As shown, all three can achieve the interception of the target.
[0105] From figure 2 , image 3 It can be seen from the figure that the trajectories intercepted by the UAV in Comparative Example 1 and Comparative Example 2 have a large curvature, especially in Comparative Example 1, the UAV followed the target for nearly a circle before realizing the interception, while the implementation In Example 1, the trajectory intercepted by the UAV is relatively straight, the trajectory length is short, the time it takes to meet the target is less, and the interception time is short.
[0106] Comparative example 1 and comparative example 1, embodiment 1 and the relative position change curve of target in embodiment 1 and comparative example 2, its result is as follows Figure 4 , Figure 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More