

Self-recovery method of multi-rotor aircraft
A recovery method and rotorcraft technology, applied in the direction of rotorcraft, motor vehicles, aircraft parts, etc., can solve the problems of limited, unrealized autonomous recovery, failure to meet the high mobility of UAVs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
experiment example
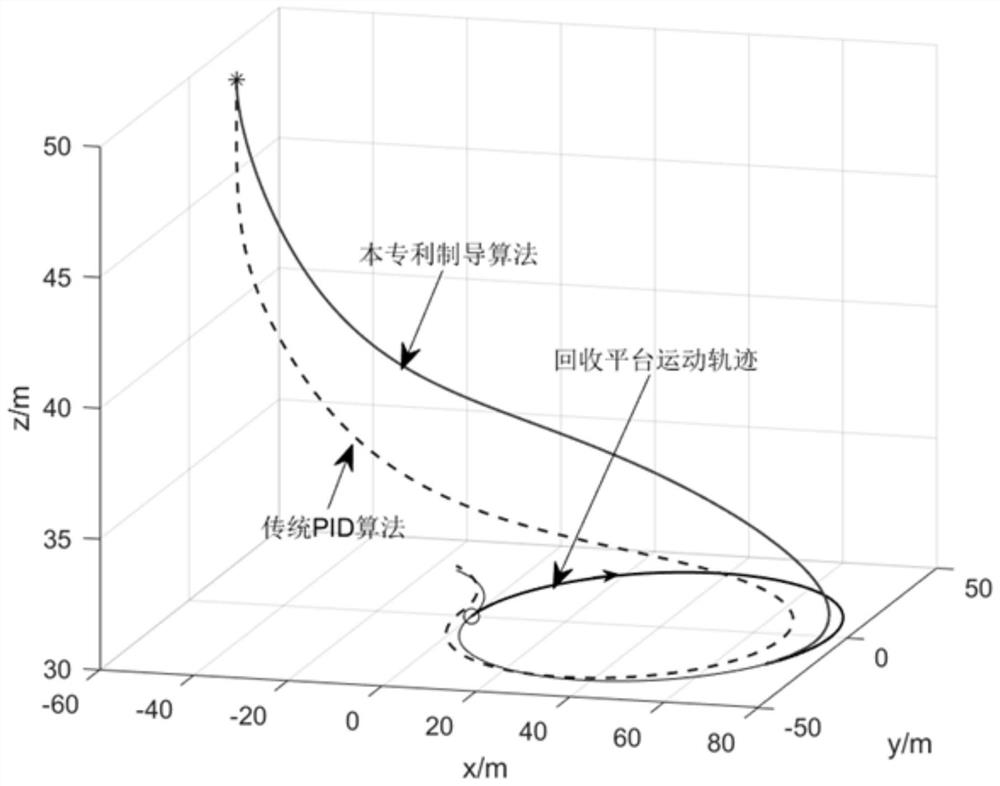
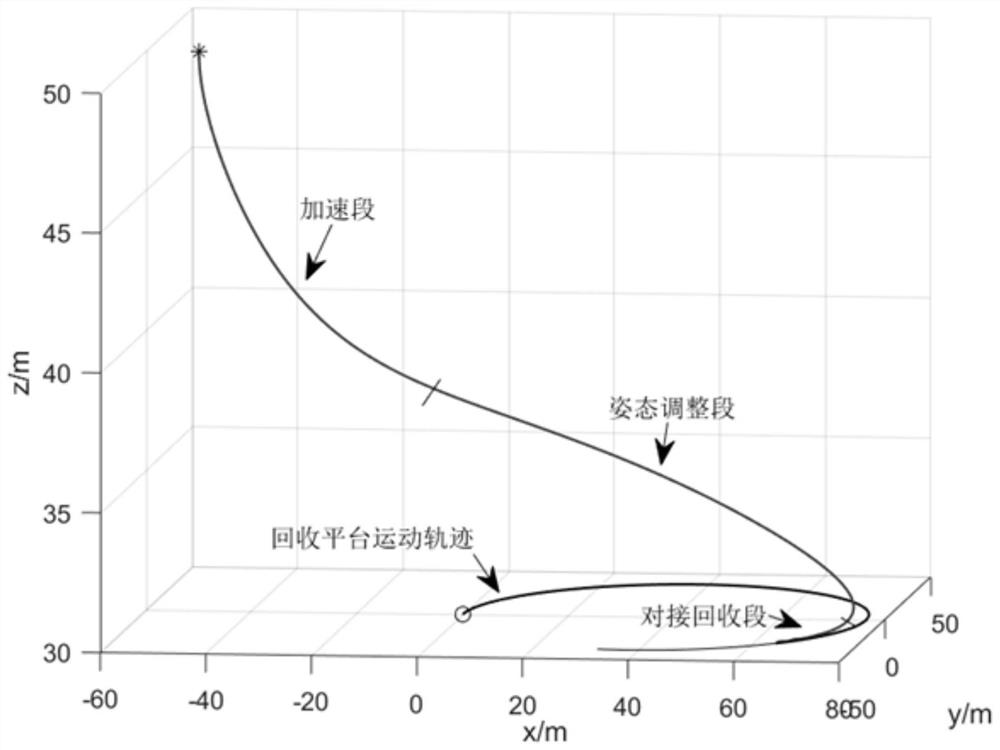
[0066] Set the recovery platform from the initial position (0, 0, 30) m, and do a figure-of-eight movement in the air, with a combined speed of 8 m / s, and the motion trajectory is as follows: figure 1 As shown by the black line,
[0067] The initial position of the multi-rotor aircraft is (-50, 0, 50) m, and the initial speed is 0. The movement information of the recovery platform is detected and sent to the control system through the photoelectric pod, and the acceleration command is provided by the following formula (1) and the following formula (4): Control the multi-rotor to move towards the target, and then use the traditional PID algorithm to control the multi-rotor for comparison.
[0068]
[0069]
[0070] In the formula, the value of N is 4, Ω Los and Ω d can be solved in real time;
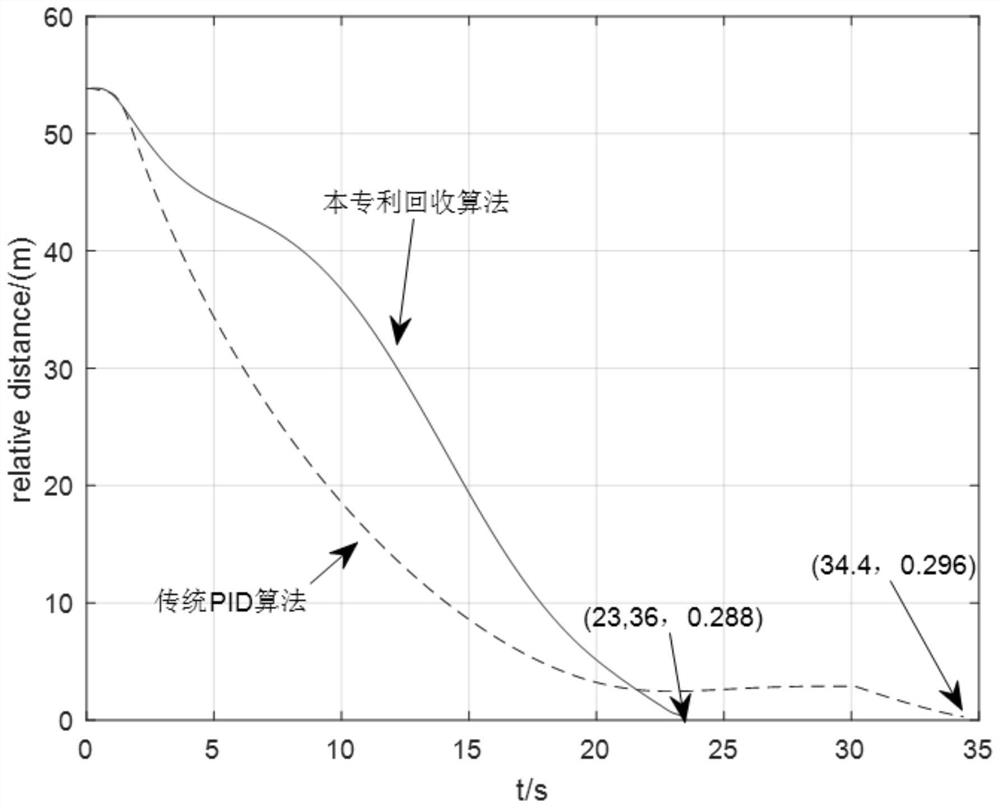
[0071] The trajectory of the multi-rotor aircraft and the recovery platform is as follows: figure 1 As shown in , it can be seen from the figure that the multi-rotor controll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More