

Modular robot capable of climbing pole
A modular, robotic technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., which can solve problems such as poor performance and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments.
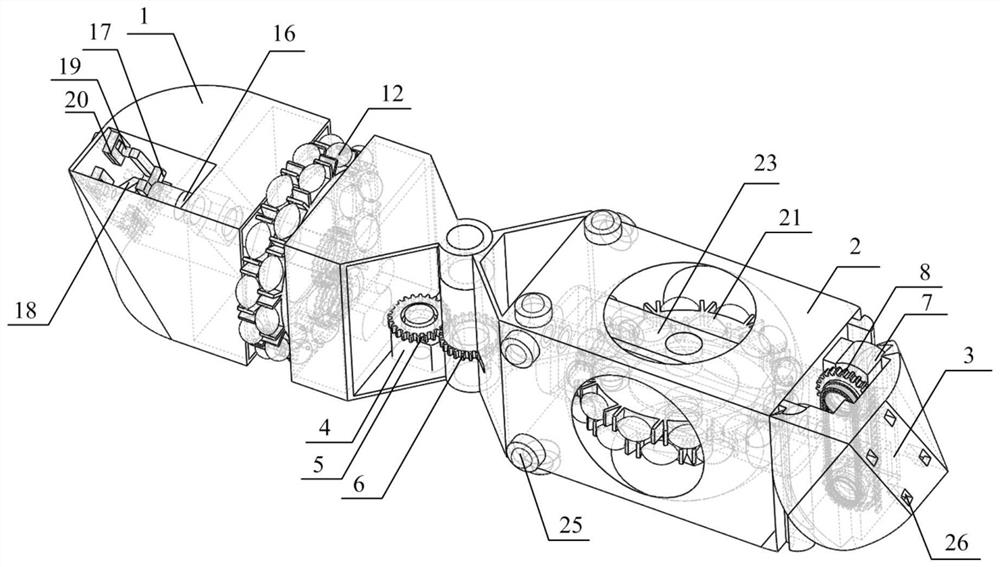
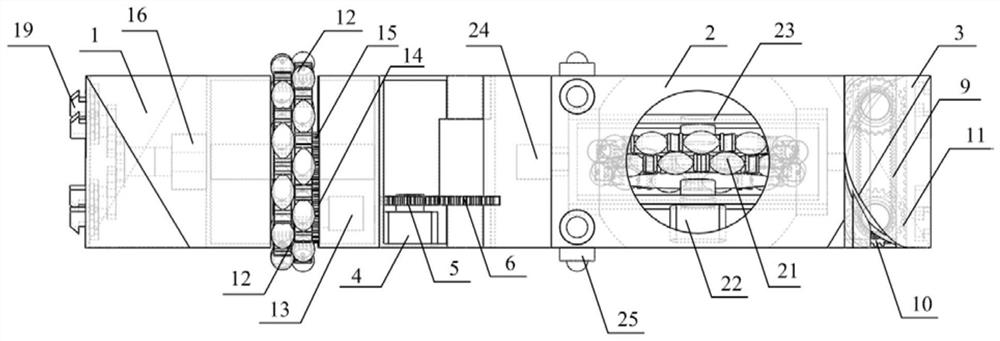
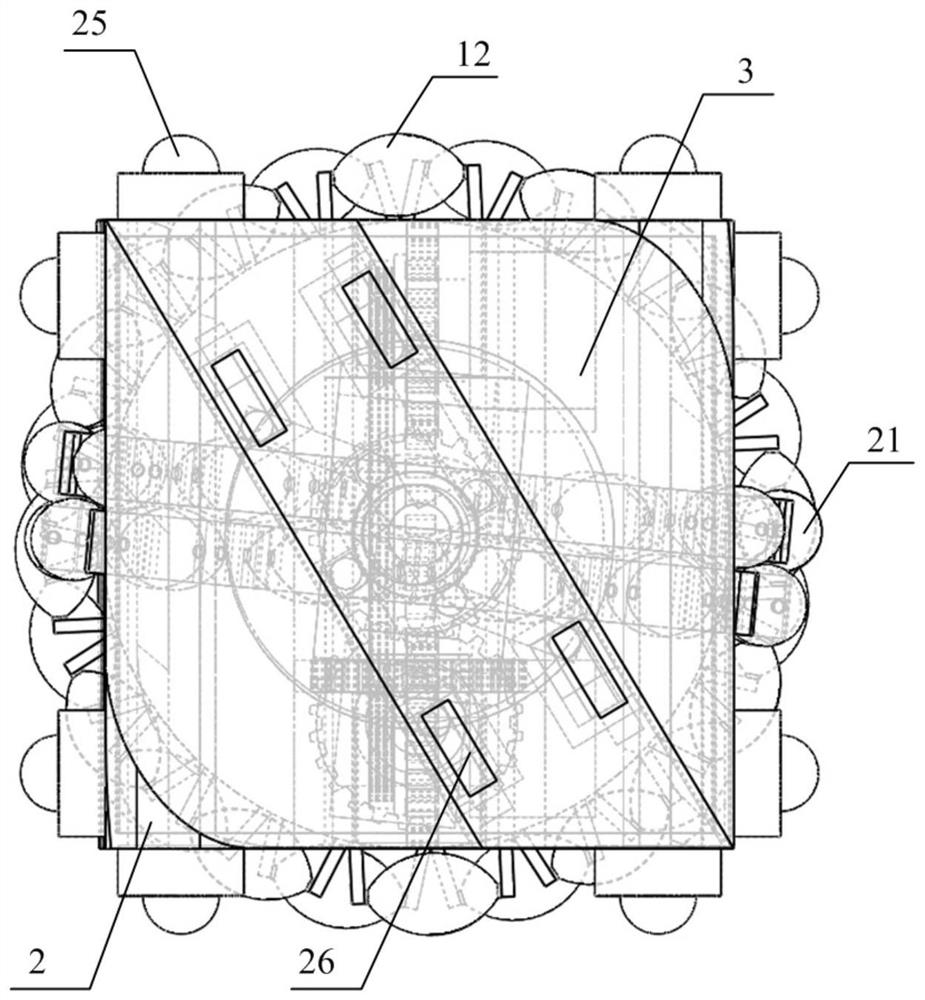
[0037] A modular robot that can climb poles, such as Figure 1 to Figure 5 As shown, it includes a first frame 1, a second frame 2 and a third frame 3; one end of the first frame 1 is hinged with one end of the second frame 2 through a hinge shaft, and the second frame 2. The other end is slidingly connected with the third rack 3;
[0038] The first mecanum wheel 12 is installed in the middle of the first frame 1, the central axis of the first mecanum wheel 12 is coaxial with the central axis of the first frame 1, and the first mecanum wheel 12 is coaxial with the central axis of the first frame 1. When the wheel 12 rotates, it is used to drive the first frame 1 to move along a direction perpendicular to the central axis of the first frame 1;
[0039] The middle part of the second frame 2 is provided with a second mecanum wheel 21, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More