

Path planning method and device for mobile robot, and storage medium
A mobile robot and path planning technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of strong randomness and poor stability, and achieve the effect of small randomness, improved growth efficiency, and improved growth efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
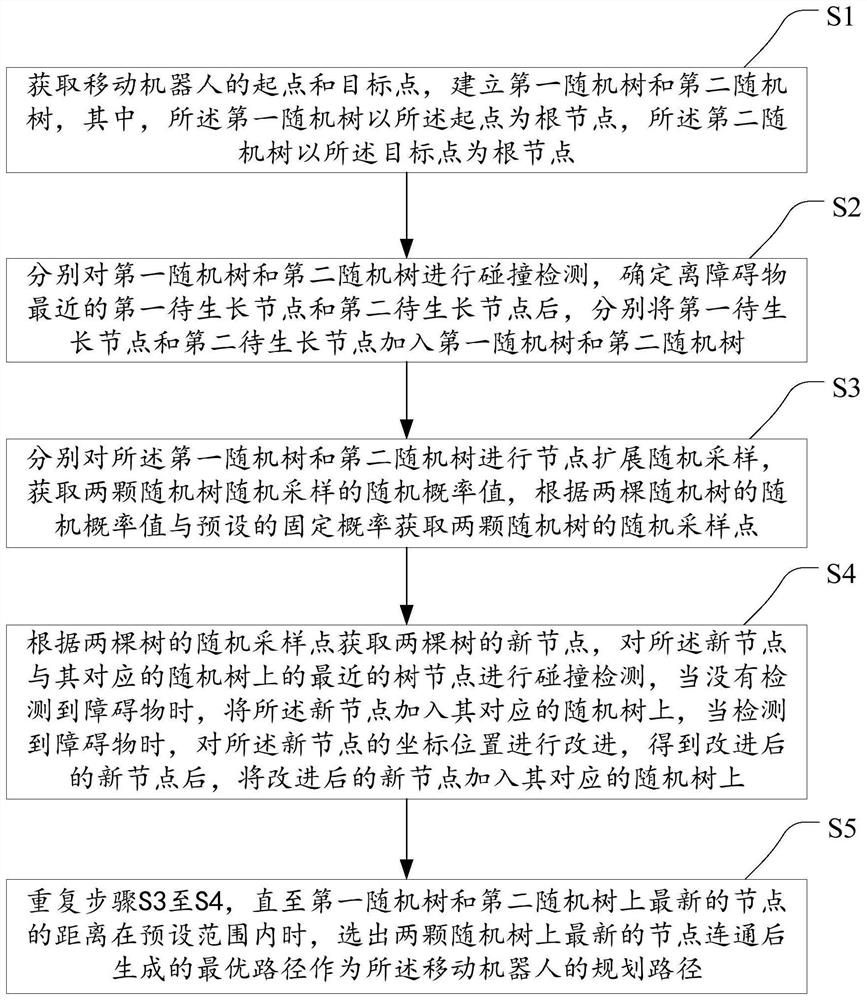
[0053] see figure 1 , the path planning method of the mobile robot that the embodiment of the present invention provides, comprises the following steps:
[0054] S1. Obtain the starting point and target point of the mobile robot, and establish a first random tree and a second random tree, wherein the first random tree uses the starting point as the root node, and the second random tree uses the target point as the root node root node.
[0055] Specifically, the conventional RRT algorithm is a search algorithm for incremental sampling. Its main idea is to take the starting point of the path as the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More