

Intelligent tower connected graph construction method for planning inspection route of unmanned aerial vehicle (UAV)
A technology of track planning and construction method, applied in three-dimensional position/course control, etc., can solve problems such as waste of energy consumption, inability to meet the needs of complex route inspection in large areas, and short flight distances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
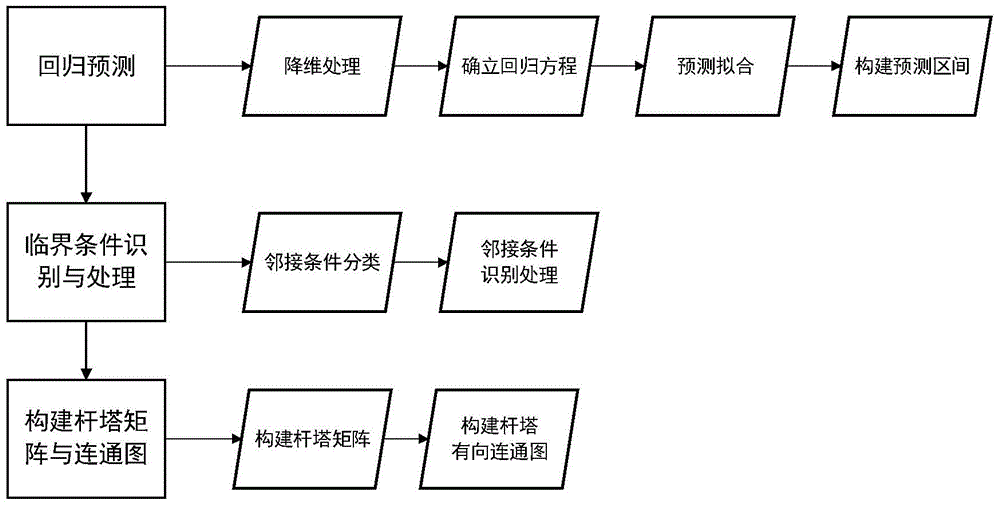
[0061] This embodiment provides a method for constructing an intelligent pole-tower connectivity graph for UAV inspection track planning, such as figure 1 As shown, it includes the following steps:
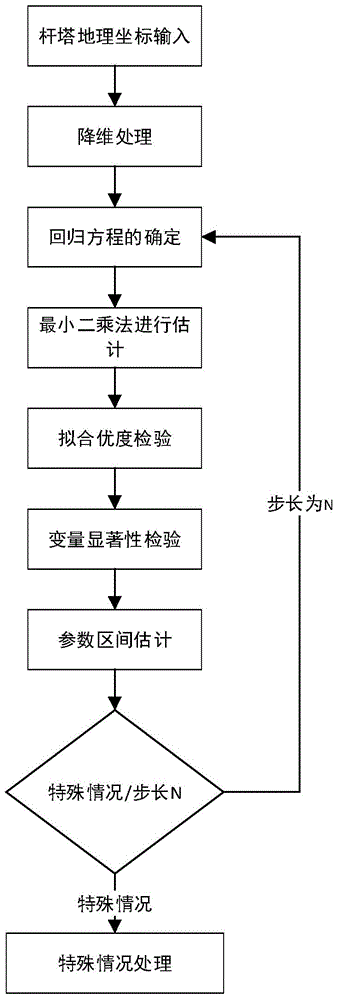
[0062] A. Use the unary nonlinear regression prediction method to predict the distribution of transmission line towers, generate several tower lines, and each tower line covers several towers. like figure 2 As shown, step A specifically includes the following steps:
[0063] A1. Dimensionality reduction processing: carry out dimensionality reduction processing on the geographic coordinates of the three-dimensional pole tower and convert them into two-dimensional coordinates; set the three-dimensional coordinates of the original tower A as (x t ,y t ,z t ),x t Indicates the longitude coordinates of the three-dimensional space of the tower, y t Indicates the latitude coordinates of the tower, z t Indicates the altitude of the tower, then the coordinates of tower A after dime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More