

Robot path planning method based on multiple regions, robot and terminal equipment
A path planning and robotics technology, applied in the field of robotics, to achieve the effect of improving efficiency and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
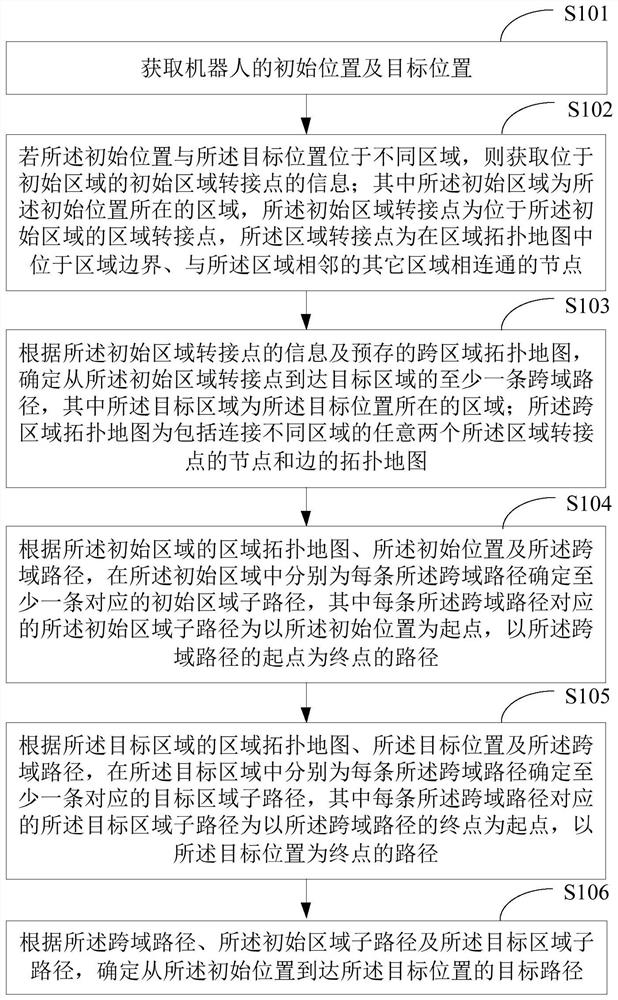
[0037] figure 1 It shows a schematic flow chart of a multi-region-based robot path planning method provided by the embodiment of the present application. The execution subject of the multi-region-based robot path planning method is a robot. The details are as follows:
[0038] In S101, an initial position and a target position of the robot are acquired.
[0039] When the robot receives the moving task, the position of the robot at this time is obtained as the initial position, and the final position to be reached by the moving task is obtained as the target position.
[0040] Optionally, before acquiring the initial position and the target position of the robot, the robot acquires a mobile task dispatch instruction carrying information about the target position, and the mobile task dispatch instruction may be sent to the robot by other terminal equipment (such as a server or a user terminal). The robot can also be generated by the user directly operating on the robot's operat...
Embodiment 3
[0118] Figure 5 It shows a schematic structural diagram of a robot provided by the embodiment of the present application. For the convenience of description, only the parts related to the embodiment of the present application are shown:
[0119] The robot includes: a location acquisition unit 51 , an initial area transfer point acquisition unit 52 , a cross-domain route determination unit 53 , an initial area sub-route determination unit 54 , and a target area sub-route determination unit 55 . in:
[0120] The position obtaining unit 51 is used to obtain the initial position and the target position of the robot.
[0121] An initial area transfer point acquisition unit 52, configured to acquire information on an initial area transfer point located in the initial area if the initial position and the target position are located in different areas; wherein the initial area is where the initial position is located area, the initial area transition point is an area transition poi...
Embodiment 4
[0138] Figure 6 It is a schematic diagram of a terminal device provided by an embodiment of the present application. Such as Figure 6 As shown, the terminal device 6 of this embodiment includes: a processor 60, a memory 61, and a computer program 62 stored in the memory 61 and operable on the processor 60, such as a multi-region-based robot path planning program . When the processor 60 executes the computer program 62, it realizes the steps in the above embodiments of the multi-region-based robot path planning method, for example figure 1 Steps S101 to S106 are shown. Alternatively, when the processor 60 executes the computer program 62, it realizes the functions of the modules / units in the above-mentioned device embodiments, for example Figure 5 Function of units 51 to 56 shown.
[0139]Exemplarily, the computer program 62 can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 61 and executed by the processor 60 to co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More