Robot collision detection method based on external torque estimation model
A collision detection and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high price and unfavorable widespread promotion, and achieve the effect of promoting safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
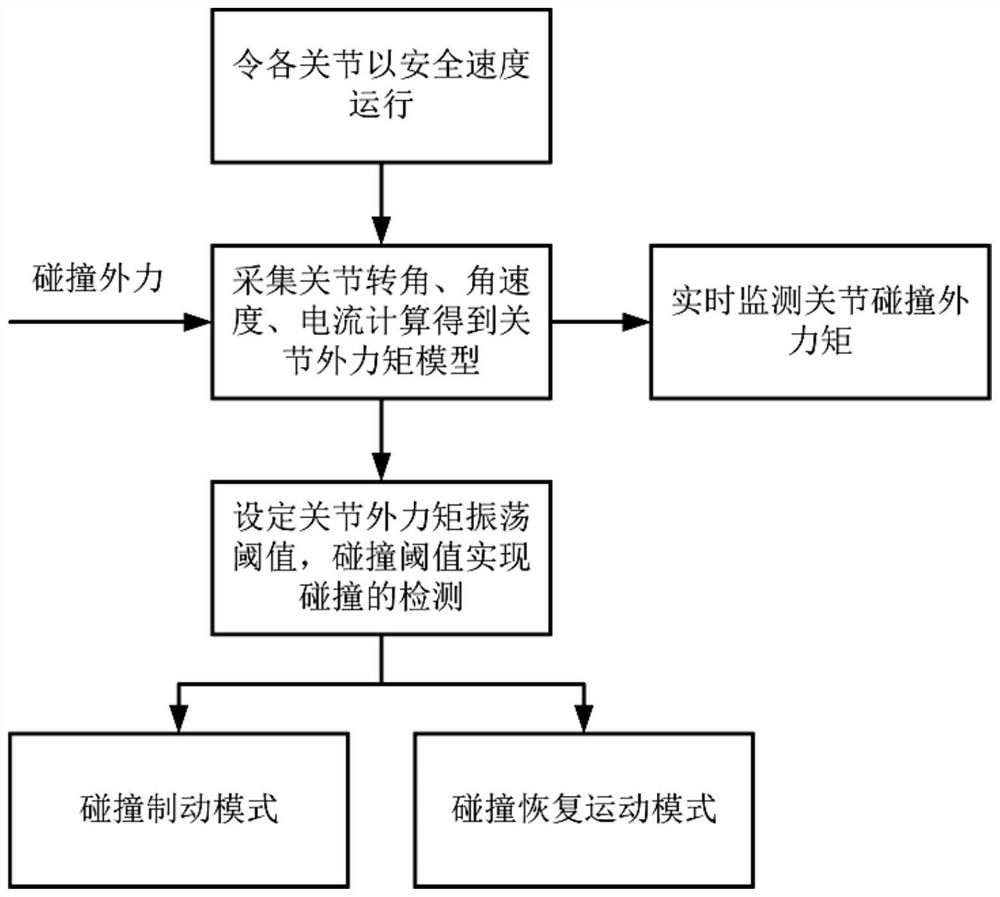
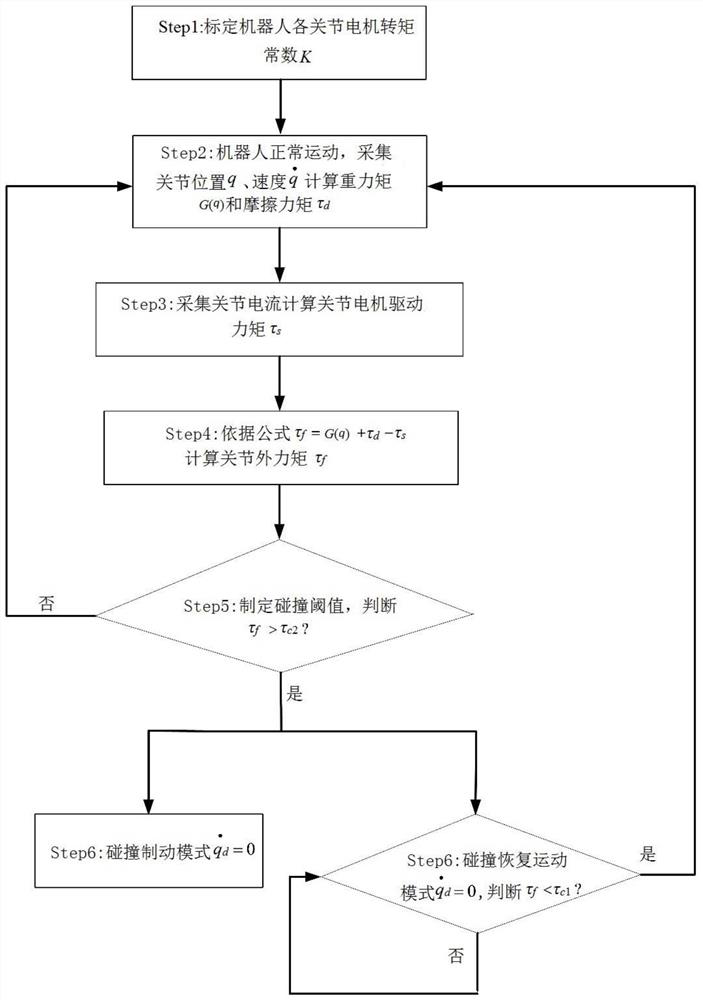
[0024] Such as figure 1 , 2 As shown, the present invention discloses a robot collision detection method based on an external moment estimation model, aiming at realizing safe, simple and effective robot collision detection. Including the following steps:
[0025] Step 1: Calibrate the motor torque constant K of each joint of the robot before running the robot.
[0026] Step 2: The robot moves normally, each joint runs at a safe speed, and the actual position q and running speed of the joint are collected Calculate the actual gravity moment G(q) and friction moment τ of each join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com