

Task planning method and device based on end point backtracking under signal sequential logic constraint
A technology for signal timing and task planning, applied in the direction of constraint-based CAD, data processing applications, prediction, etc., can solve the problems of reduced path planning success rate, unable to find the optimal path, difficult to converge, etc., to improve the convergence success rate, reduced planning time, effect of reduced planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
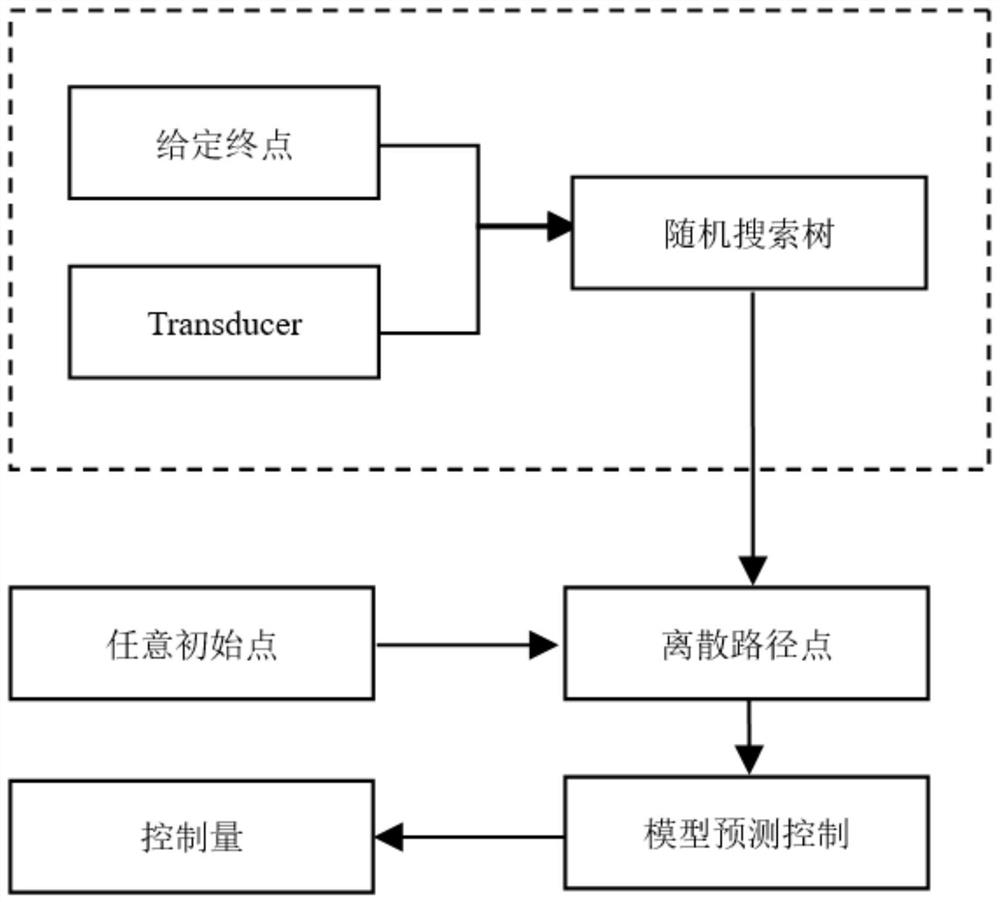
[0043] The present invention provides a task planning method based on end-point backtracking under the constraint of Signal Sequence Logic (STL). Space; in three-dimensional space, with the end point of the task as the root node, backtracking is performed under the constraints of signal timing logic, the search tree is obtained and the path cost is stored, and offline planning based on backtracking at the end point is realized. In online task planning, the path with the least cost can be found by using the search tree.
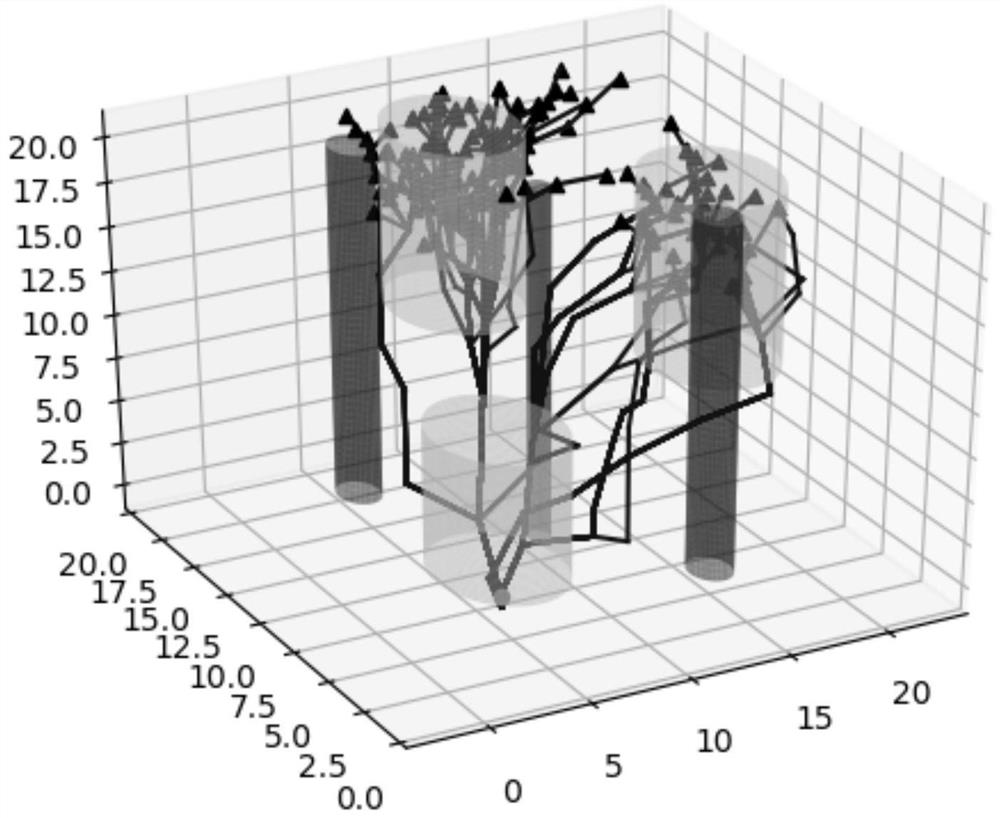
[0044] It can be seen that the present invention constructs a search tree by backtracking from the preset end point to the initial state plane, and the leaf nodes can cover the entire initial state space, so the reachable space can be completely traversed. When using the search tree to search forward, a path can always be found to reach the task node, thereby improving the success rate of convergence; and for any initial state, only need to select the leaf nod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More