

Design method of linear active disturbance rejection controller based on neural network prediction
A linear active disturbance rejection and neural network technology, applied in the design field of linear active disturbance rejection controller, can solve the problems of characteristic change, instability, and poor adjustment effect, and achieve the effect of precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings of the description.
[0044] The invention proposes a design method of an improved active disturbance rejection controller based on neural network prediction.
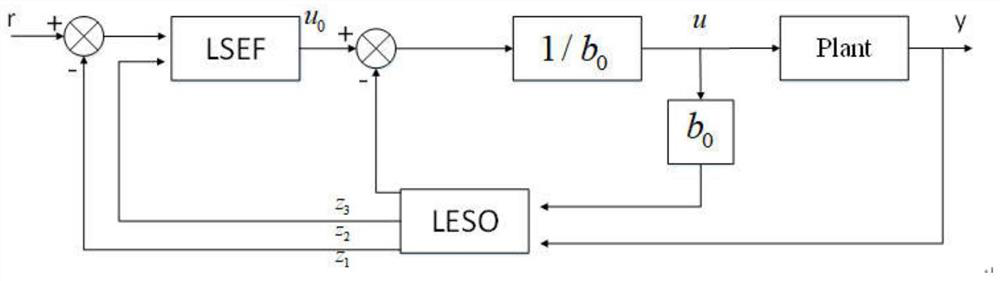
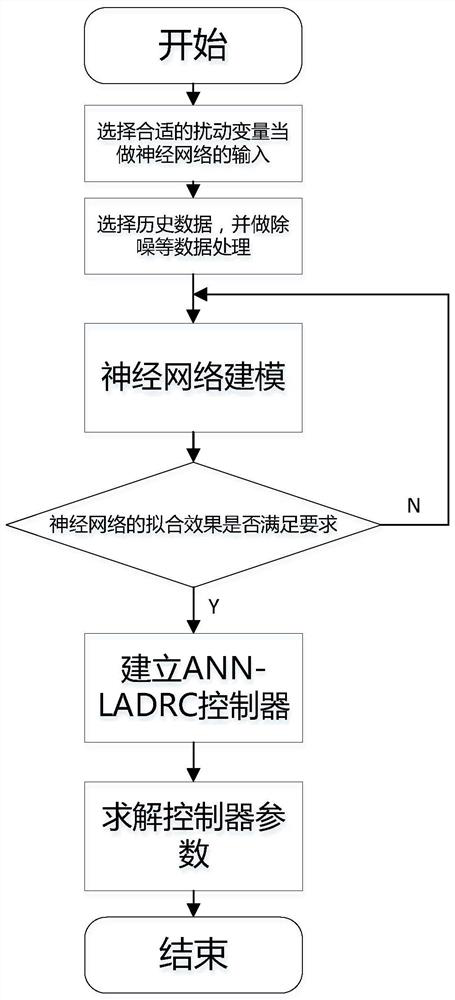
[0045] Such as figure 1 , figure 2 As shown, the design method of the linear active disturbance rejection controller includes:
[0046] Step 1. Obtain and preprocess sample data, construct a sample training set and a sample test set;
[0047] Step 2, using the sample training set to construct the ELMAN neural network prediction model, and verifying with the sample test set;
[0048] Step 3. Input the operating condition data to the ELMAN neural network prediction model to obtain the output value and transform the expanded state observer to construct ANN-LADRC.
[0049] Further, the acquisition and preprocessing of sample data described in step 1, and the construction of a sample training set and a sample test...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More