Robust stabilization control method and system for mechanical arm system
A stabilization control, system robust technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the result is only applicable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
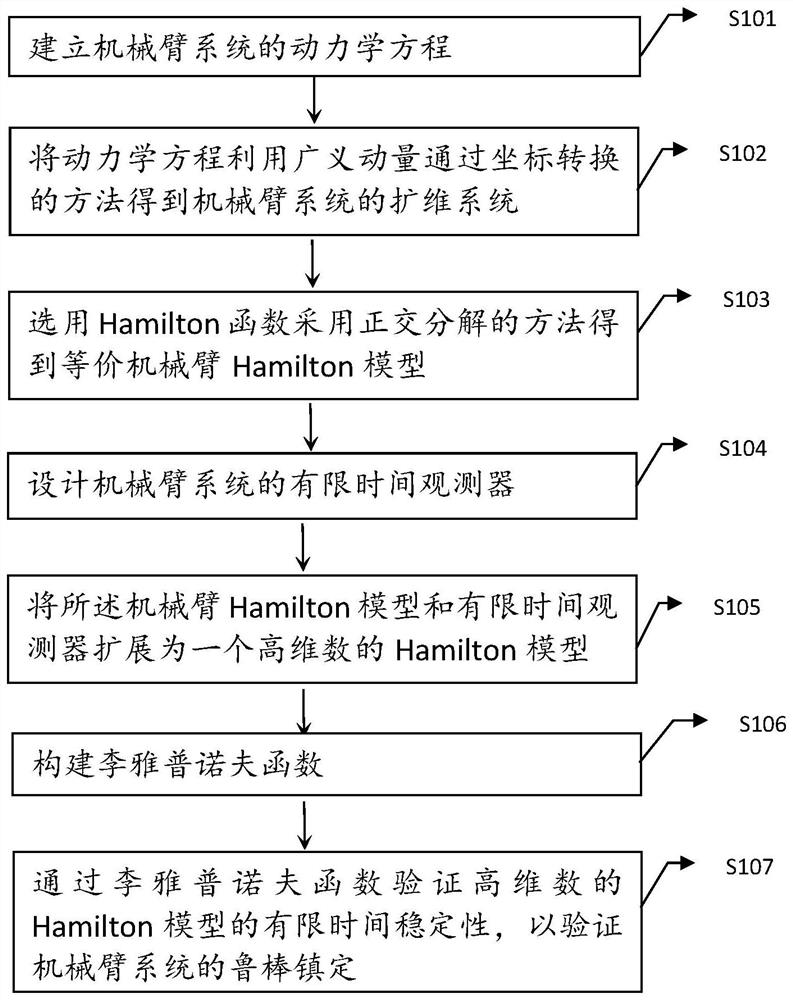
[0116] Such as figure 1 A robust stabilization control method and system for a manipulator system proposed in Embodiment 1 of the present invention are given.
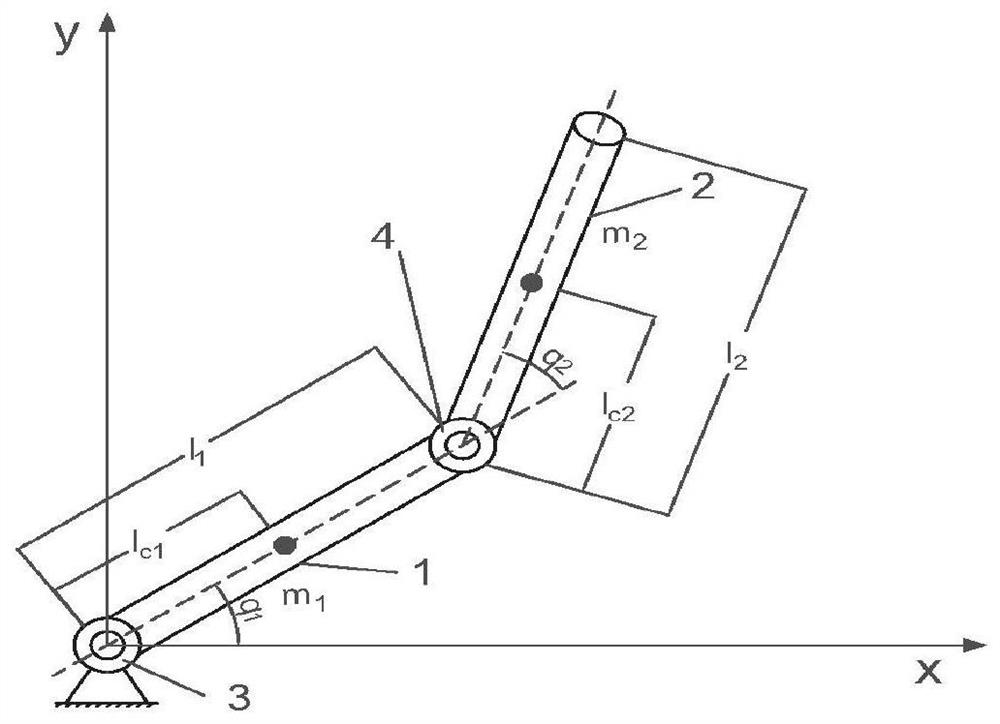
[0117] In step S101, the dynamic equation of the manipulator system is established, such as figure 2 A schematic diagram of the structure of the manipulator system is given, in which m1 is the mass of the first joint of the manipulator, and m2 is the mass of the second joint of the manipulator.
[0118]where the kinetic equation is:
[0119] Among them, q=[q 1 ,q 2 ] T ∈ R 2 is the rotation angle vector of the manipulator joint; q 1 is the angle between the first joint of the manipulator and the X axis; q 2 is the angle between the second joint of the manipulator and the X axis; is the rotational angular velocity vector of the manipulator joint; is the rotational acceleration vector of the manipulator joint; M(q)∈R 2×2 is the inertia matrix; is the Coriolis force matrix; G(q)∈R 2 is the gravitational ...
Embodiment 2
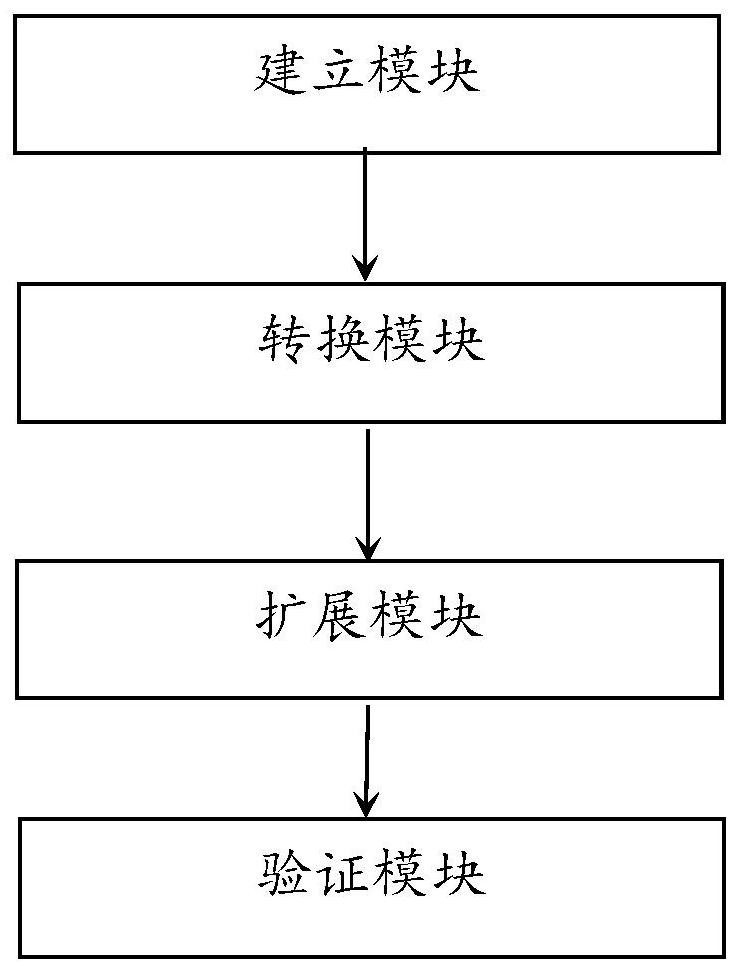
[0232] Based on the robust stabilization control method for the manipulator system proposed in Embodiment 1 of the present invention, Embodiment 2 of the present invention also proposes a robust stabilization control system for the manipulator system, such as image 3 A schematic diagram of a robust stabilization control of a manipulator system according to Embodiment 2 of the present invention is given. The system includes: an establishment module, a conversion module, an extension module and a verification module;
[0233] The building block is used to establish the dynamic equation of the manipulator system;
[0234] The conversion module is used to use the generalized momentum to obtain the extended dimension system of the manipulator system through the method of coordinate transformation by using the generalized momentum; select the Hamilton function and use the method of orthogonal decomposition to obtain the equivalent manipulator Hamilton model;
[0235] The extension ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap