Active compensation method for auv communication delay based on data-driven state predictor
A data-driven, communication-delayed technology, applied in instruments, general control systems, adaptive control, etc., can solve the problems of improving control effect, fixed structure of AUV formation control law, inability to combine, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
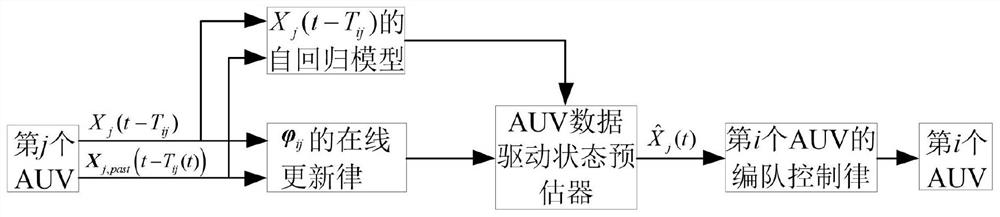
[0035] The present invention will be further described below with reference to the accompanying drawings. like figure 1 As shown, the principle of a multi-AUV communication delay active compensation method based on a data-driven state predictor is as follows: using the j-th AUV motion state X with a delay j (t-T ij ) and λ ij a historical motion state vector X with a delay j,past (t-T ij (t)), establishing X j (t-T ij ) of the autoregressive model, and design the autoregressive model parameter vector The online update law of ; based on the above, an AUV data-driven state predictor is designed to give the current actual motion state X of the jth AUV j Estimated value of (t) Will It is applied to the formation control law design of the i-th AUV, so as to realize the active compensation of the communication delay existing between multiple AUVs.
[0036] The present invention is not limited to this embodiment, and any equivalent ideas or changes within the technical s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com