

Vehicle control method, device and equipment and storage medium
A vehicle control and vehicle technology, applied in the fields of equipment and storage media, devices, and vehicle control methods, can solve the problems of low longitudinal control accuracy, poor longitudinal tracking adaptive ability of vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
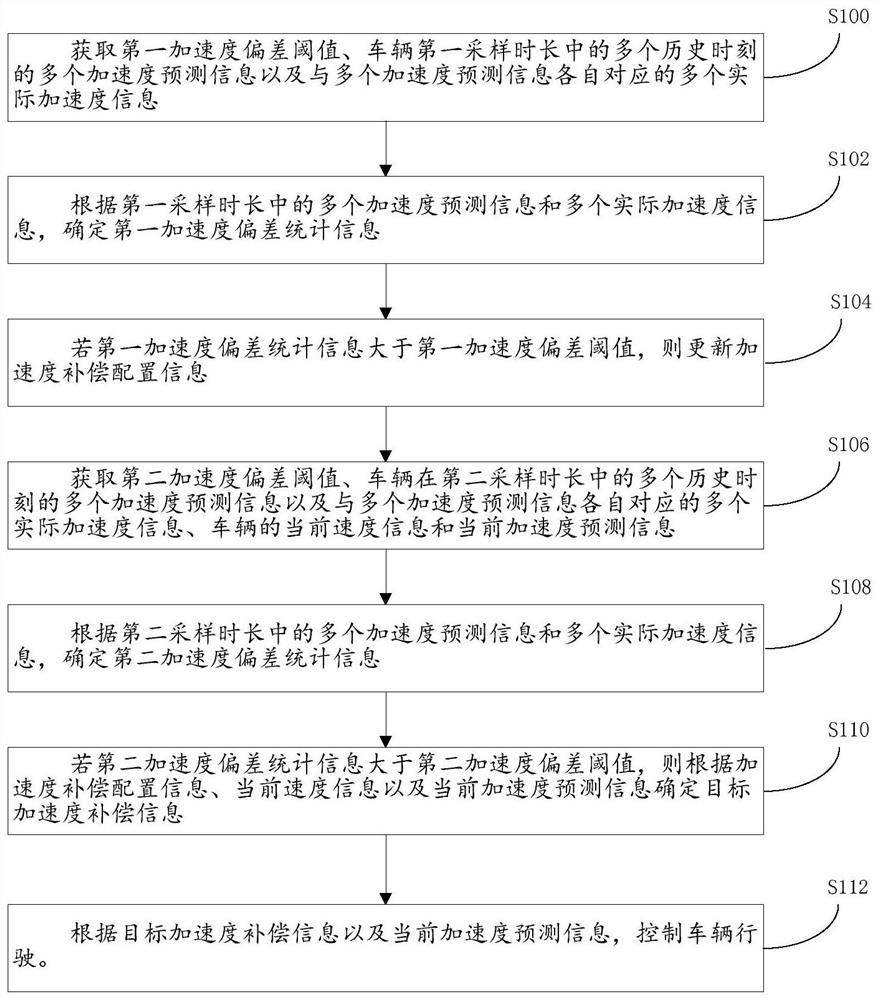
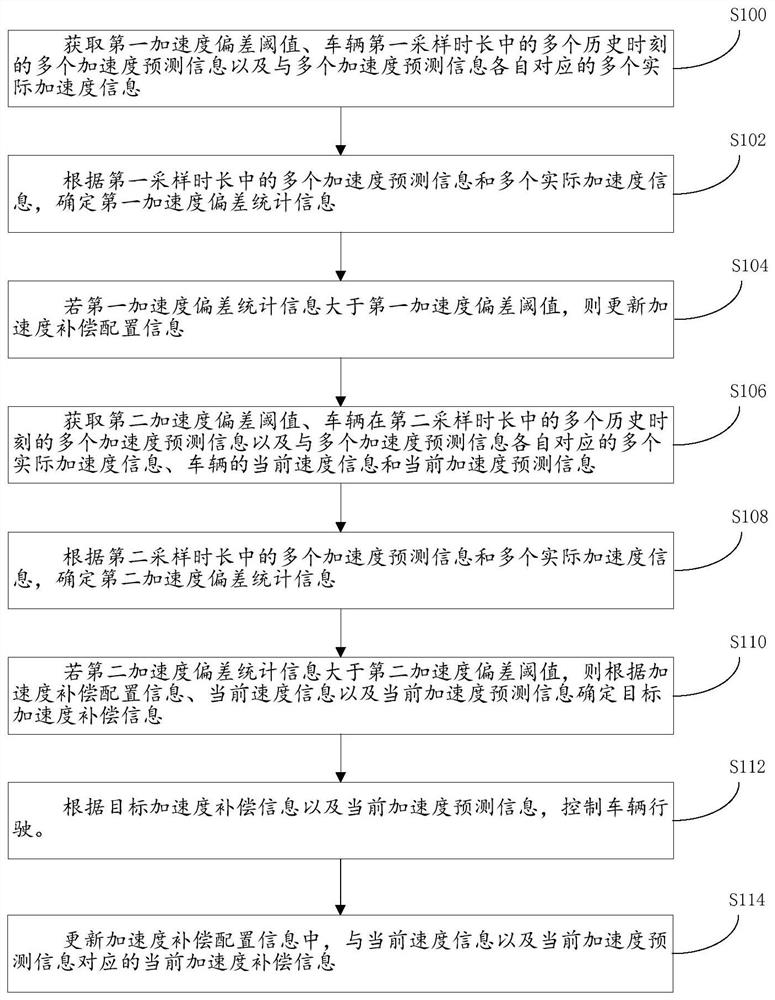
[0051] figure 1 It is a flowchart of a vehicle control method provided according to an embodiment of the present application. refer to figure 1 As shown, the method may include:
[0052] S100. Acquire a first acceleration deviation threshold, a plurality of acceleration prediction information at a plurality of historical moments in a first sampling period of the vehicle, and a plurality of actual acceleration information respectively corresponding to the plurality of acceleration prediction information.
[0053] Specifically, the vehicle control method can be used in an automatic driving scenario. The first acceleration deviation threshold is a threshold of acceleration deviation, and the first acceleration deviation threshold may be preset, and may be determined based on analysis of a large amount of experimental data. Wherein, the acceleration deviation may refer to the difference between the predicted acceleration value and the actual acceleration of the vehicle at the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More