

A control system for a wheeled robot to automatically walk along the centerline of a slope
A wheeled robot and control system technology, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve running instability, changing operating parameters, wheeled robot cannot run smoothly, etc. problem, to achieve the effect of accurate comparison and accurate inclination information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
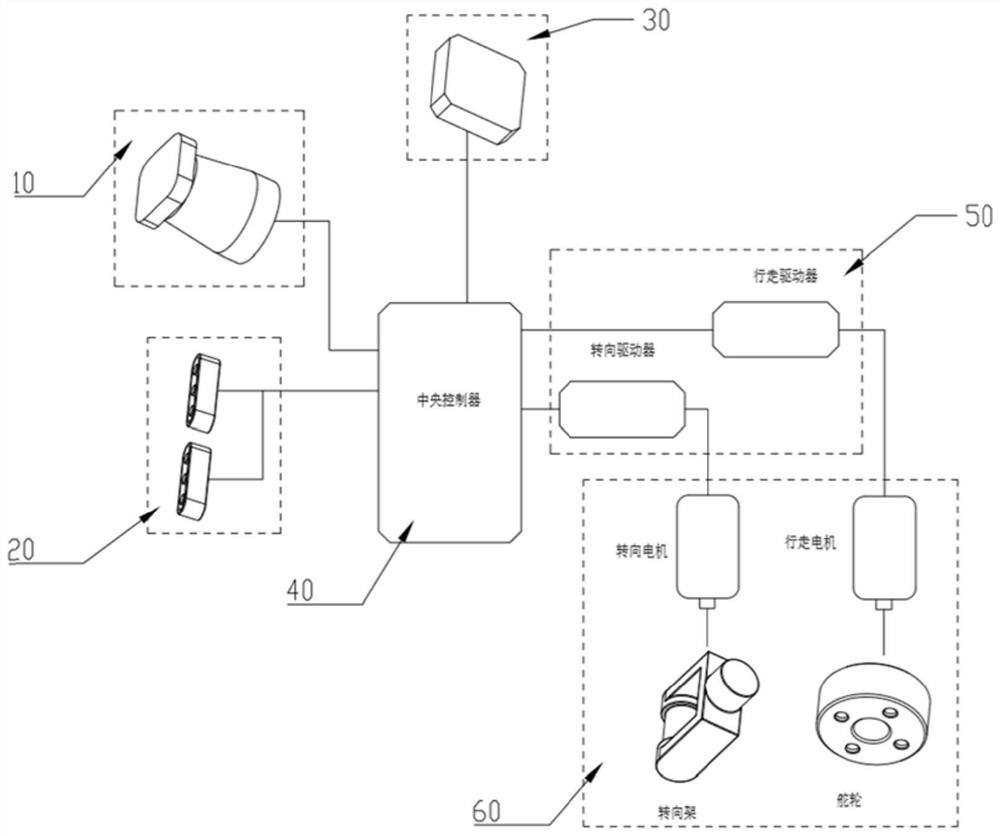
[0052] figure 1 It is a schematic diagram of the overall structure of the control system for the wheeled robot constructed by the present invention to automatically walk along the center line of the slope. Such as figure 1 As shown, the system mainly includes a slope edge recognition module, a target distance recognition module, a slope angle recognition module, a central controller, and an adaptive slope angle drive module. In addition, actuator modules can also be configured as required. Each of them will be explained in detail below.
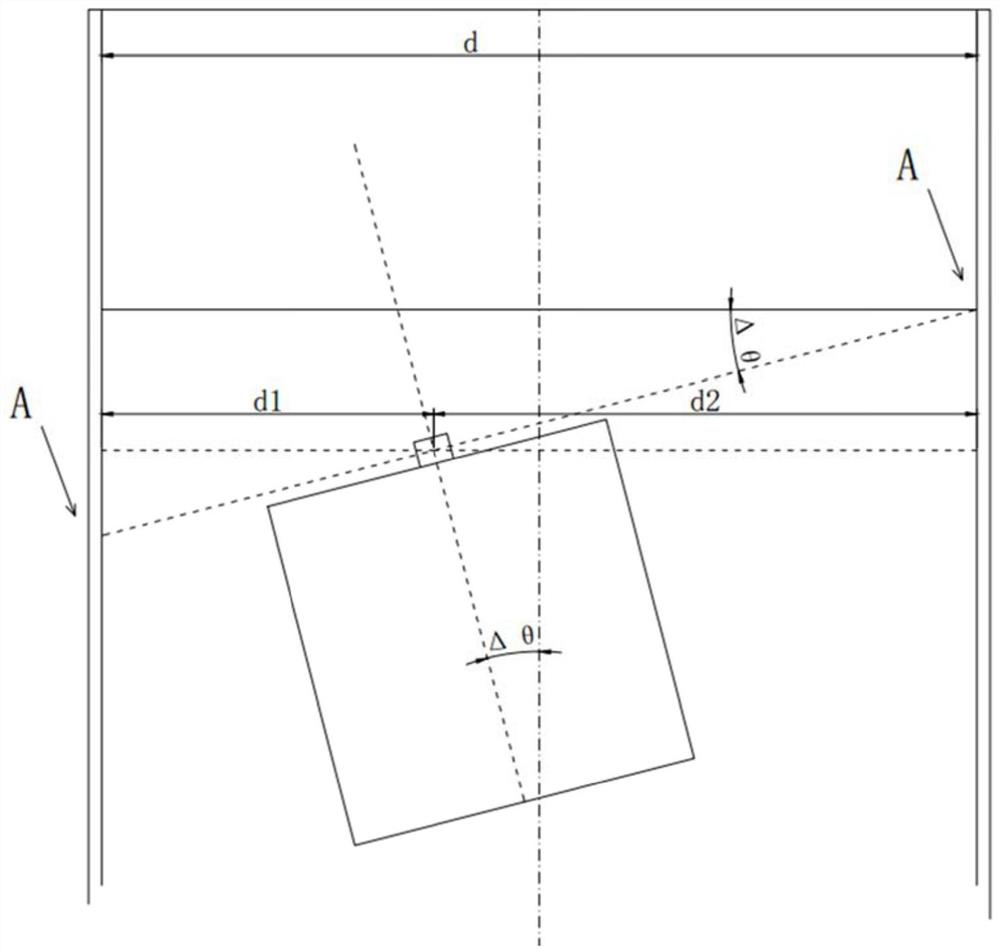
[0053] figure 2 It is a schematic diagram used to demon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More