

Intelligent traffic control system and method based on wireless Mesh ad hoc network
A technology of intelligent traffic control and traffic control, which is applied in the field of traffic control and intelligent traffic control, and can solve the problems of low robustness and fault tolerance, low intelligence, low reliability and flexibility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
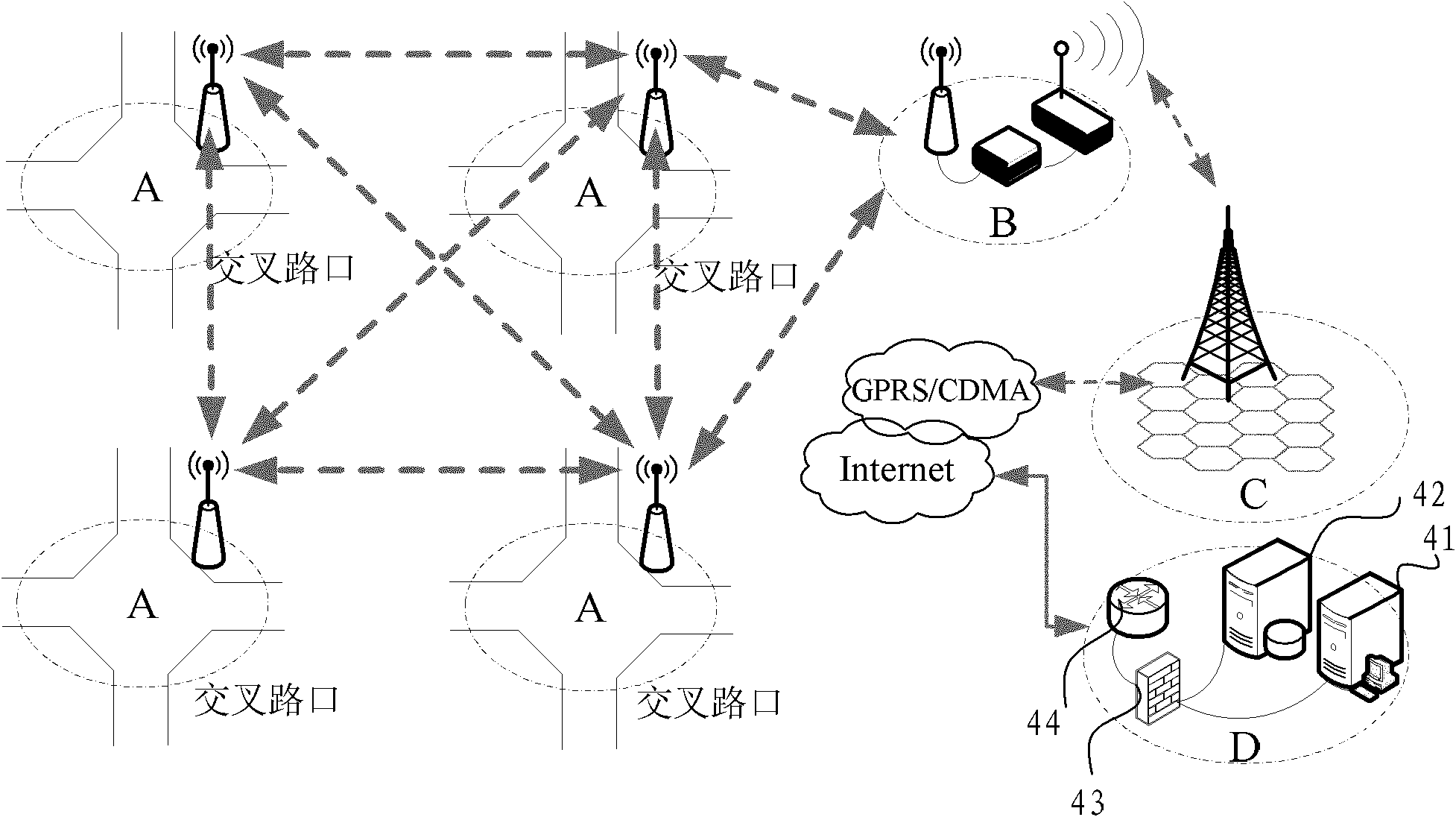
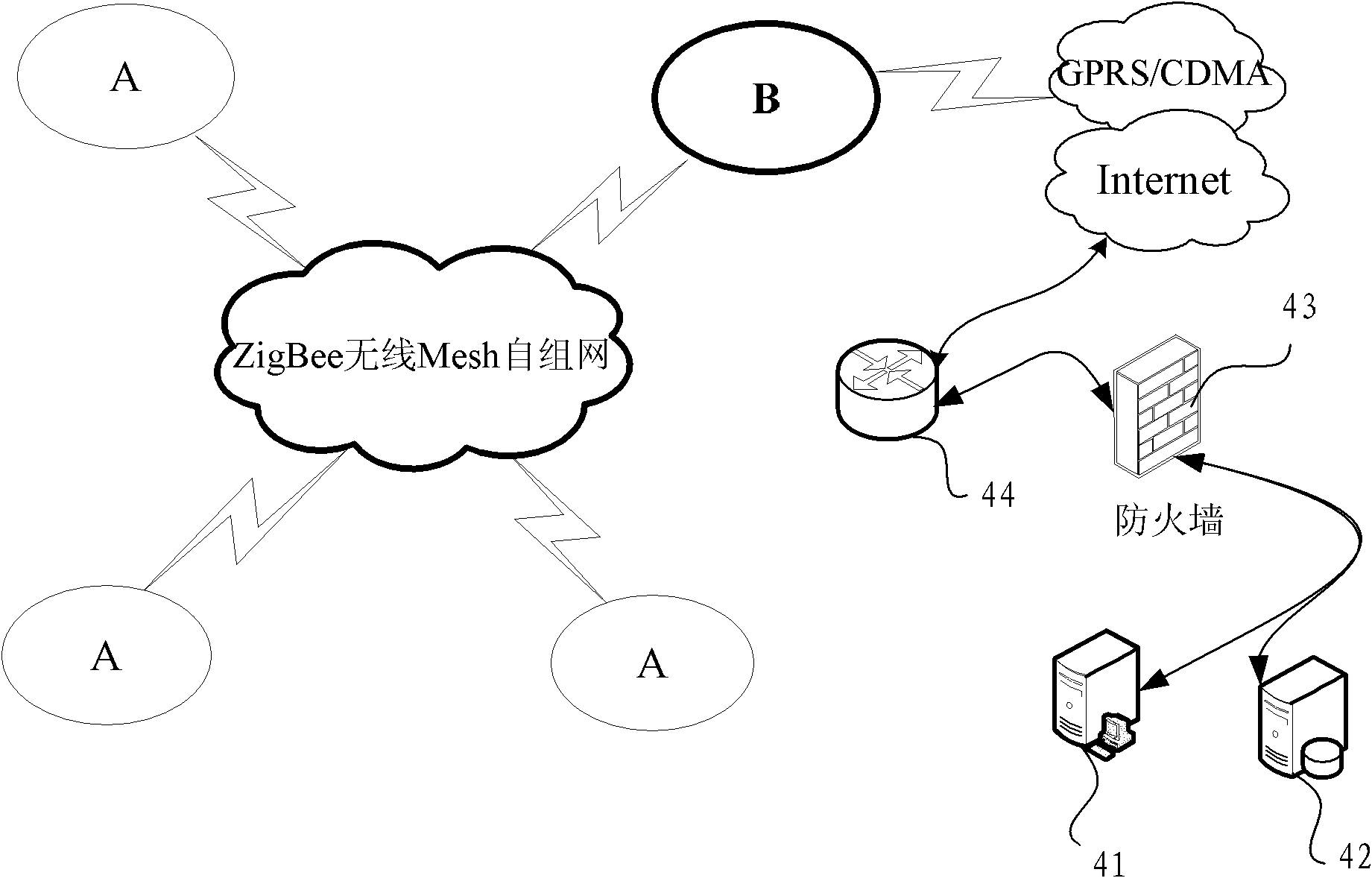
[0131] An intelligent traffic control system based on wireless Mesh ad hoc network, such as figure 1 As shown, the intelligent traffic control system includes: 4 traffic control nodes A, 1 ZigBee regional base station B, mobile communication base station C and traffic control center D; Each device is connected by RS-232 / RS-485 bus. ZigBee technology is used between adjacent nodes to realize wireless Mesh ad hoc communication network and real-time exchange of traffic data. ZigBee regional base station B and traffic control center D use GPRS through mobile communication base station C / CDMA data transmission equipment for remote connection;
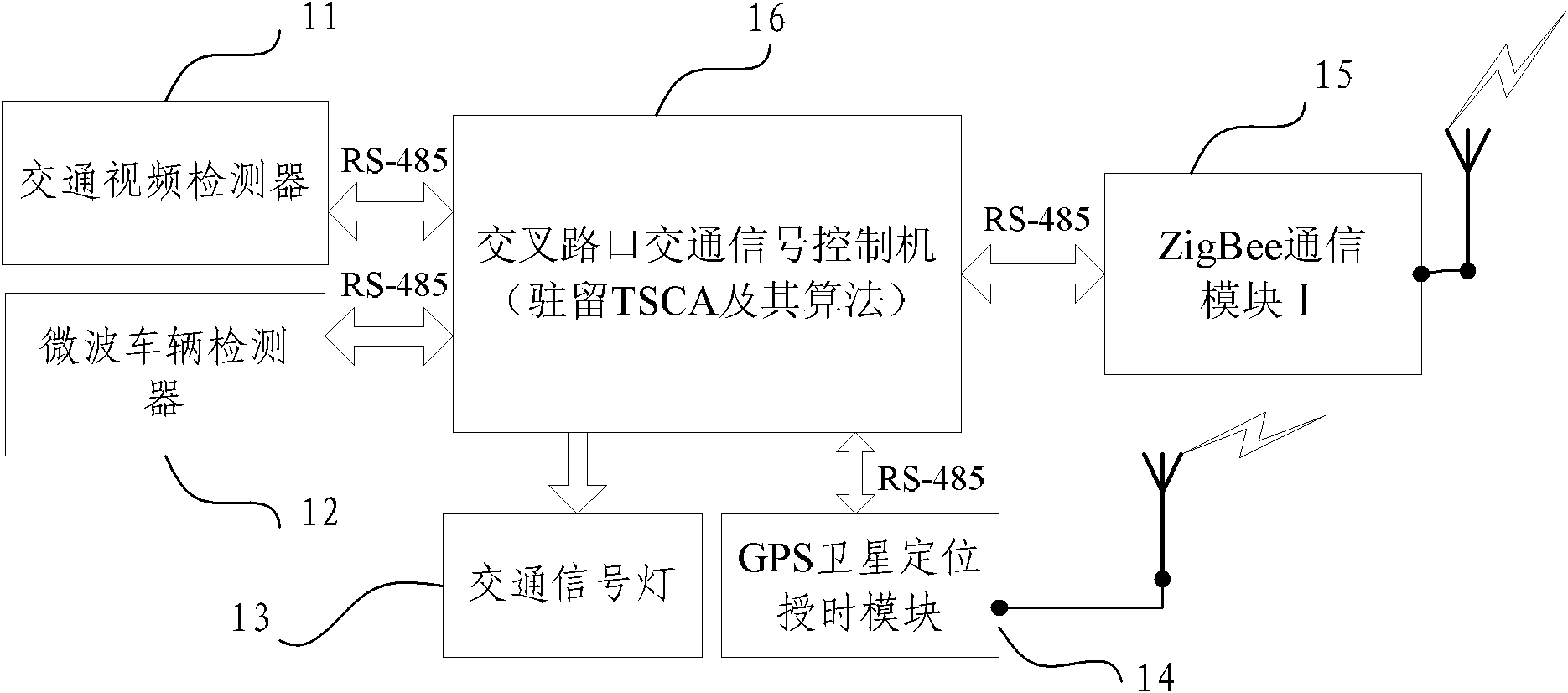
[0132] like image 3 Shown, described each traffic control node A comprises traffic flow parameter acquisition equipment, traffic signal control equipment and ZigBee communication module I 15, and described traffic flow parameter acquisition equipment comprises traffic flow video detector 11, traffic microwave vehicle detector 12 and GPS ...
Embodiment 2
[0148] A kind of method that the intelligent traffic control system based on wireless Mesh ad hoc network described in embodiment one is used for intelligent traffic control, it is the method that adopts ZigBee short distance wireless communication technology and intelligent network technology to combine, each node in the control system The traffic flow parameter collection and traffic signal control equipment connected to the Mesh ad hoc network through Zigbee wireless communication, and according to the GPS node positioning information and road network topology predefined control target area (the area can be planned as a point or line according to actual needs , surface shape) and adjacent associated nodes in accordance with the BNNC traffic control protocol - that is, the traffic control nodes based on the traffic control protocol of the adjacent negotiation mechanism, exchange each other's traffic flow parameters, signal machine control parameters in real time, and negotiate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More