Unmanned vehicle path tracking control method based on nonlinear tire and driver model
A control method and path tracking technology, applied in the direction of control devices, etc., can solve the problems of few, consider the driver model, etc., achieve low physiological and psychological load intensity, improve tracking performance and stability performance, improve tracking performance and unmanned driving. The effect of vehicle stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] Further detailed description of the technical solution of the present invention will be described below with reference to the drawings:
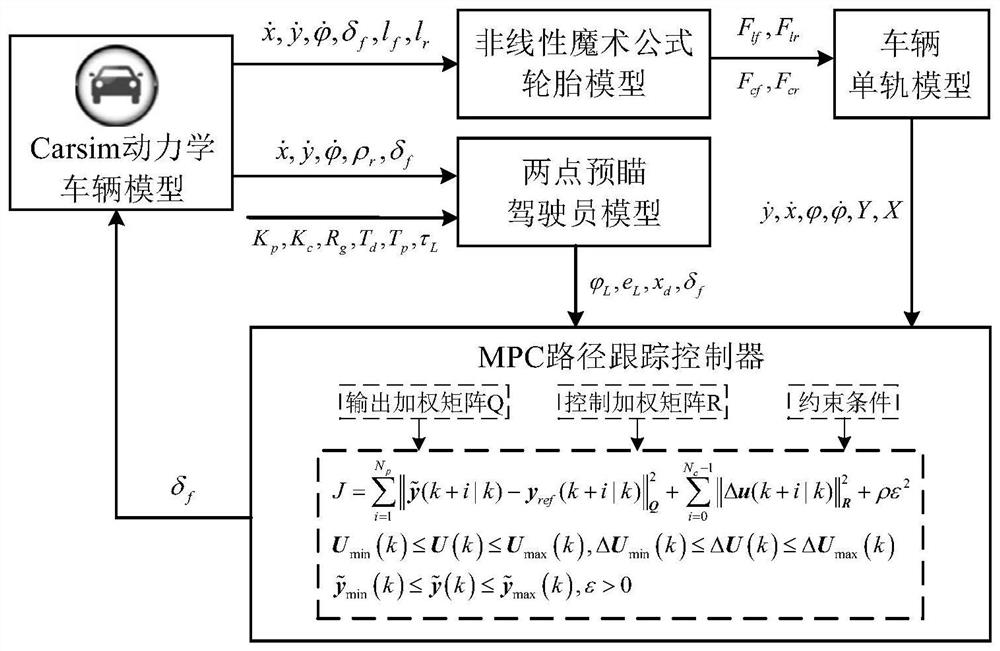
[0096] like figure 1 As shown, the present invention discloses an unmanned vehicle path tracking control method based on a nonlinear tire and a driver model, which specifically includes the following steps:
[0097] Step 1) Establish a three-degree-freedom drone dynamics model that considers the lateral motion, longitudinal movement and yawning movement of the front drive
[0098]
[0099] In the formula, M is the quality of the unmanned vehicle, The longitudinal speed, lateral speed, Dividend acceleration, lateral acceleration, F, respectively xf , F yf The force of the X direction, Y direction, F xr , F yr The force, the force of the X direction, and the force of the rear tire, respectively. For the horizontal angular speed, Hand angular acceleration, I z Rotating inertia for unmanned winding Z axes, L f L r The distance between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com